|
|
|
|
This section is only present when Plasticity is used as a subnode to:
|
|
•
|
The default is von Mises criterion with associate plastic potential.
|
|
•
|
Select Tresca to use Tresca yield criterion. The plastic potential can be an Associated or nonassociated flow rule with the von Mises stress as plastic potential.
|
|
•
|
Select Hill orthotropic to use Hill’s criterion. From the Specify list select either the Initial tensile and shear yield stresses σys0ij or Hill’s coefficients F, G, H, L, M, and N. The default for either selection uses values From material (if it exists) or User defined. The principal directions of orthotropy are inherited from the coordinate system selection in the parent node. See Expressions for the Coefficients F, G, H, L, M, N for details.
|
|
•
|
For User defined enter a value or expression for the equivalent stress. Write any expression in terms of the stress tensor components or its invariants in the ϕ(σ) field.
|
|
•
|
Select Perfectly plastic (ideal plasticity) if the material can undergo plastic deformation without any increase in yield stress.
|
|
•
|
For Linear the default Isotropic tangent modulus ETiso uses values From material (if it exists) or User defined. The yield level σys is modified as hardening occurs, and it is related to the equivalent plastic strain εpe as
|
|
•
|
Select Ludwik from the list to model nonlinear isotropic hardening. The yield level σys is modified by the power-law
|
|
•
|
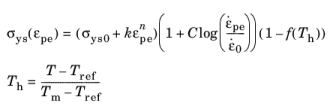
Select Johnson–Cook from the list to model strain rate dependent hardening. The Strength coefficient k, Hardening exponent n, Reference strain rate
|
|
-
|
For Power law, enter the Reference temperature Tref, the Melting temperature Tm, and the Temperature exponent, m.
|
|
-
|
For User defined, enter the Thermal Softening function f(Th), the Reference temperature Tref, and the Melting temperature Tm. The softening function f(Th) typically depends on the built-in variable for the normalized homologous temperature Th and have the properties f(0) = 0 and f(1) = 1. The variable is named using the scheme <physics>.<elasticTag>.<plasticTag>.Th, for example, solid.lemm1.plsty1.Th.
|
|
•
|
For Swift nonlinear isotropic hardening, the Reference strain ε0 and the Hardening exponent n use values From material (if it exists) or User defined. The yield level σys is modified by the power-law
|
|
•
|
Select Voce from the list to model nonlinear isotropic hardening. The yield level σys is modified by the exponential law
|
|
•
|
For Hockett–Sherby nonlinear isotropic hardening, the Steady-state flow stress σ∝, the Saturation coefficient m, and the Saturation exponent n use values From material (if it exists) or User defined. The yield level σys is increased by the exponential law
|
|
•
|
For Hardening function, the isotropic Hardening function σh(εpe) uses values From material or User defined. The yield level σys is modified as
|
|
-
|
This definition implies that the hardening function σh(εpe) in the Material node must be zero at zero plastic strain. In other words, σys = σys0 when εpe = 0. With this option it is possible to enter any nonlinear isotropic hardening curve. The hardening function can depend on more variables than the equivalent plastic strain, for example the temperature. Select User defined to enter any function of the equivalent plastic strain εpe. The variable is named using the scheme <physics>.epe, for example, solid.epe.
|
|
•
|
Select No kinematic hardening (when either ideal plasticity or an isotropic hardening model is selected as isotropic hardening model) if it is a material that can undergo plastic deformation without a shift in the yield surface.
|
|
•
|
If Linear is selected as the Kinematic hardening model, the default Kinematic tangent modulus Ek uses values From material. This parameter is used to calculate the back stress σb as plasticity occurs:
|
|
•
|
If Armstrong–Frederick is selected from the list, the default Kinematic hardening modulus Ck and Kinematic hardening parameter γk use values From material. These parameters are used to calculate the back stress σb from the rate equation
|
|
•
|
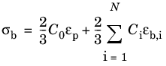
When Chaboche is selected from the Kinematic hardening model list, the default Kinematic hardening modulus C0 uses values From material. Add branches as needed to solve N rate equations for the back stresses:
|
|
|
To compute the energy dissipation caused by plasticity, enable the Calculate dissipated energy check box in the Energy Dissipation section of the parent material node.
|
|
•
|
|
•
|
Nonlocal coupling modulus, Hnl. This stiffness is the penalization of the difference between the local and nonlocal variables. A larger value enforces the equivalent plastic strain εpe to be closer to the nonlocal equivalent plastic strain εpe,nl.
|
|
|
|
|
|
|
•
|
Maximum number of local iterations. To determine the maximum number of iteration in the Newton loop when solving the local plasticity equations. The default value is 25 iterations.
|
|
•
|
Relative tolerance. To check the convergence of the local plasticity equations based on the step size in the Newton loop. The final tolerance is computed based on the current solution of the local variable and the entered value. The default value is 1e-6.
|
|
|
See also Numerical Solution of the Elastoplastic Conditions in the Structural Mechanics Theory chapter.
|