When a Porous Plasticity node is present, a Volumetric Plastic Strain plot and a Current Void Volume Fraction plot are available under Result Templates.
|
|
When a Porous Plasticity node is present, a Volumetric Plastic Strain plot and a Current Void Volume Fraction plot are available under Result Templates.
|
|
•
|
|
•
|
|
•
|
|
•
|
|
•
|
|
•
|
|
•
|
|
•
|
|
•
|
|
•
|
Select how the Equivalent plastic strain εpe is computed — Associated, von Mises, or User defined. Enter a User defined expression in the hp field as needed. See Hardening Rule for details.
|
|
•
|
|
•
|
|
•
|
|
|
|
•
|
|
•
|
|
|
|
|
|
•
|
Select Perfectly plastic (ideal plasticity) if the material can undergo plastic deformation without any increase in yield stress.
|
|
•
|
For Linear the default Isotropic tangent modulus ETiso uses values From material (if it exists) or User defined. The flow stress (yield level) σys is modified as hardening occurs, and it is related to the equivalent plastic strain in the porous matrix εpe as
|
|
•
|
Select Ludwik from the list to model nonlinear isotropic hardening. The flow stress (yield level) σfm is modified by the power law
|
|
•
|
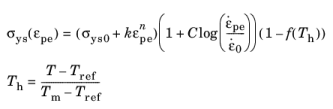
Select Johnson–Cook or Modified Johnson–Cook from the list to model strain rate dependent hardening. The Strength coefficient k, Hardening exponent n, Reference strain rate
|
|
-
|
For Power law, enter the Reference temperature Tref, the Melting temperature Tm, and the Temperature exponent, m.
|
|
-
|
For User defined, enter the Thermal Softening function f(Th), the Reference temperature Tref, and the Melting temperature Tm. The softening function f(Th) typically depends on the built-in variable for the normalized homologous temperature Th and have the properties f(0) = 0 and f(1) = 1. The variable is named using the scheme <physics>.<elasticTag>.<plasticTag>.Th, for example, solid.lemm1.popl1.Th.
|

|
•
|
For Swift nonlinear isotropic hardening, the Reference strain ε0 and the Hardening exponent n use values From material (if it exists) or User defined. The yield stress depends on the power law
|
|
•
|
Select Voce from the list to model nonlinear isotropic hardening. The yield level is modified by the exponential law
|
|
•
|
For Hockett–Sherby nonlinear isotropic hardening, the Steady-state flow stress σ∝, the Saturation coefficient m, and the Saturation exponent n use values From material (if it exists) or User defined. The yield level is increased by the exponential law
|
|
•
|
For Hardening function, the isotropic Hardening function σh(εpe) uses values From material or User defined. The flow stress (yield level) is modified as
|
|
-
|
This definition implies that the hardening function σh(εpe) in the Material node must be zero at zero plastic strain. In other words, σys = σys0 when εpe = 0. With this option it is possible to enter any nonlinear isotropic hardening curve. The hardening function can depend on more variables than the equivalent plastic strain in the porous matrix, for example the temperature. Select User defined to enter any function of the equivalent plastic strain εpe. The variable is named using the scheme <physics>.<elasticTag>.<plasticTag>.epe, for example, solid.lemm1.popl1.epe.
|
|
|
|
•
|
For Elliptic, enter the Initial pressure limit pc0 and the Initial ellipse centroid pcc0. The ellipse aspect ratio is then derived from the intersection of the ellipse with Drucker–Prager criterion.
|
|
•
|
|
•
|
|
•
|
|
•
|
When Exponential is selected from the list, the default Hardening modulus Kc and the Maximum volumetric plastic strain εpvol,max are taken From material.
|
|
•
|
When Hardening function is selected from the list, the default Hardening modulus pch and the Maximum volumetric plastic strain εpvol,max are taken From material.
|
|
•
|
Select the Hardening variable — Volumetric plastic strain, Equivalent plastic strain, or User defined.
|
|
|
|
•
|
Length scale, lint — The regularization length scale for the equivalent plastic strain εpe should ideally be greater than the largest mesh element size.
|
|
•
|
Nonlocal coupling modulus, Hnl — The value represents the penalization of the difference between the local and nonlocal variables. A larger value enforces the equivalent plastic strain εpe to be closer to the nonlocal equivalent plastic strain εpe,nl. A typical value would be around 10% the equivalent shear modulus of the material.
|
|
|
|
•
|
Maximum number of local iterations. To determine the maximum number of iteration in the Newton loop when solving the local plasticity equations. The default value is 25 iterations.
|
|
•
|
Relative tolerance. To check the convergence of the local plasticity equations based on the step size in the Newton loop. The final tolerance is computed based on the current solution of the local variable and the entered value. The default value is 1e-6.
|
|
|
|
|
To compute the energy dissipation caused by porous compaction, enable the Calculate dissipated energy checkbox in the Energy Dissipation section of the parent material node.
|