Select the Constant torque model from the
Rotational resistance model list in the physics interface’s
Rotational Resistance section to apply the rotational resistance torque using the constant torque model. The rotational resistance torque in 2D is simply rolling resistance torque and is defined as
Select the Varying torque model from the
Rotational resistance model list in the physics interface’s
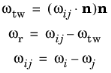
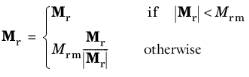
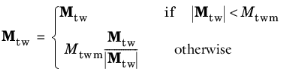
Rotational Resistance section to apply the rotational resistance torque using the varying torque model. The rotational resistance moment in 2D is just the rolling resistance torque and is defined in an incremental way as
Here, kr relates to tangential spring coefficient
kt and
Req as