Select the Linear elastic from the
Contact Force Model list in the physics interface
Force section to compute the contact forces using the linear elastic model. The two components of forces are discussed individually (
Ref. 1).
The following diagram (left) shows two grains in contact with radii R1 and
R2. As this is a soft-sphere model, there is a finite overlap between the grains in contact, although for illustrative purposes this overlap region has been greatly exaggerated.
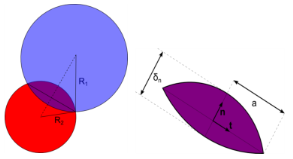
Taking a closer look at the overlap region (right figure), define unit vectors in the tangential direction t and normal direction
n. In 3D, there would be two orthogonal tangential directions
t1 and
t2. Let the normal displacement
δn (SI unit: m) be the thickness of this overlap region. For intersecting spheres, the radius of the contact area is denoted
a (SI unit: m). For two grains in contact with positions
qi and
qj (SI unit: m), the normal direction is
where kn is the normal elastic stiffness coefficient and
cn is the normal damping coefficient. In this model, these two coefficients are known and constant.
Nc is the number of neighboring grains, and
vr is the relative velocity between colliding grains at the contact point and is given by
where ω is the rotational velocity of the grain. The normal damping coefficient
cn is calculated as
and en is the coefficient of restitution in normal direction.
where kt is the tangential elastic stiffness coefficient and
ct is the tangential damping coefficient. Similar to normal force, these two are known and constant. The tangential damping constant is calculated as
et is the coefficient of restitution in tangential direction.
where vt is the tangential component of
vr, which is obtained by subtracting normal component
vn from
vr:
The calculation of the tangential displacement, δt, is dependent on time history of the physical contact between two grains. When a new physical contact happens at time
t0 between two grains,
δt is zero and is calculated as
The two steps in the calculation ensure that δt is in the contact plane. At the end of contact
δt, is set to zero.
where qw is the contact point between grain and wall.
Substituting all of the above equations in Equation 3-9 and
Equation 3-10, the normal and tangential components of the contact force between grain and wall are calculated.