|
•
|
|
•
|
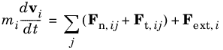
Fn and Ft are the normal and the tangential forces during contact between grains i and j; for example, Contact Force: Hertz–MD (Mindlin and Deresiewicz) Model.
|
|
•
|
|
•
|
Mrot is the torque due to rotational friction and resists the rotation of grain; see Rotational Resistance Theory for more details.
|