You are viewing the documentation for an older COMSOL version. The latest version is
available here.
The built-in turbulent dispersion models are dependent on the turbulent kinetic energy and on the turbulent dissipation rate ε (SI unit: m
2/s
3). Therefore, the accompanying fluid flow interface should use one of the following turbulence models, for which these variables are defined:
In the Continuous random walk model (
Ref. 12,
15,
16), the evaluation of the position and velocity of a fluid element chosen at random is a Markov process. For a time step
dt (SI unit: s) taken by the time-dependent solver, the general form for the change in the
ith fluid velocity component
dui is
where ai and
bij are coefficients yet to be specified,
x and
u are the position and velocity of the fluid element, and
dξj are the increments of a vector-valued Weiner process with independent components, which are uncorrelated Gaussian random numbers with zero mean and variance
dt (
Ref. 15). A more in-depth discussion of the relevance of Weiner processes in turbulent dispersion is given in
Ref. 17.
In homogeneous turbulence, the velocity perturbations dui are computed by solving a classical Langevin equation (Refs.
15 and
16):
where s (SI unit: m/s) is the fluctuating rms of the velocity perturbation in any direction. For isotropic turbulence computed using the k-
ε model,
where the dimensionless coefficient CL is on the order of unity. Typical values of
CL have been reported in the interval
[0.2,0.96] (
Ref. 12) and as low as
1/7 (
Ref. 16).
The particle Stokes number St (dimensionless) is defined as
where the particle relaxation time scale τp (SI unit: s) or particle velocity response time depends on the drag law being used (see
The Stokes Drag Law section) and on rarefaction effects applied to the drag force, if any (see the
Drag Force in a Rarefied Flow section).
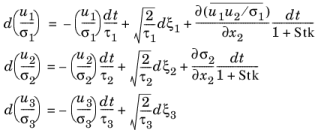
If the Continuous random walk model is used and the
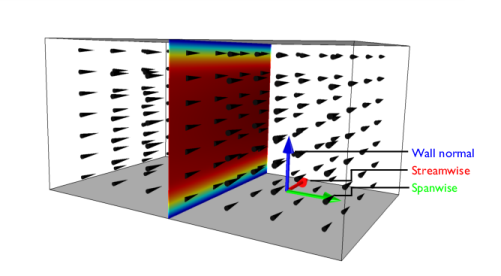
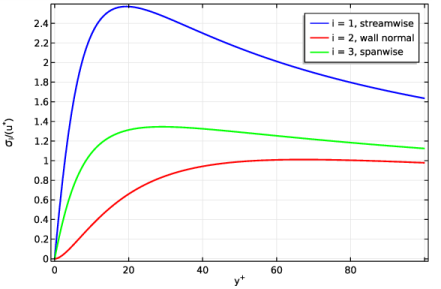
Include anisotropic turbulence in boundary layers check box is selected, the velocity perturbations are computed using different expressions in the streamwise, spanwise, and wall normal directions at the position of each particle.
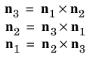
In the following, the subscripts 1,
2, and
3 refer to the streamwise, wall normal, and spanwise directions, respectively. The streamwise direction is parallel to the fluid velocity. The wall normal direction points away from the nearest surface with a
Wall boundary condition. Boundaries with the
Inlet,
Outlet, and
Symmetry boundary conditions are not considered walls for the purpose of computing the wall normal direction. The spanwise direction is orthogonal to the streamwise and wall normal directions. Thus the streamwise, wall normal, and spanwise directions form an orthonormal basis,
The anisotropic turbulence model differs from the isotropic Continuous random walk model when the particles are sufficiently close to walls such that
y+ < 100, where
y+ is the wall distance in dimensionless units,
x2 (SI unit: m) is the distance to the nearest wall,
ν (SI unit: m
2/s) is the fluid kinematic viscosity, and
u∗ (SI unit: m/s) is the friction velocity at the nearest wall. Usually
u∗ is computed by one of the turbulent flow physics interfaces.
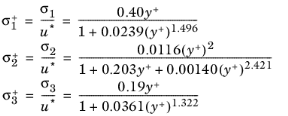
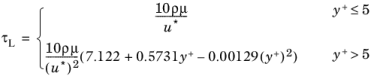
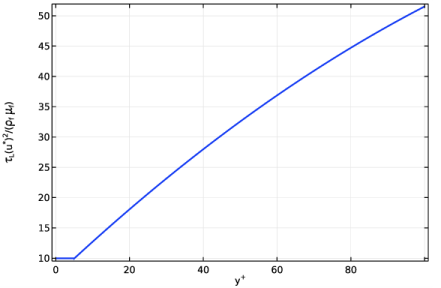
The Lagrangian time scale τL (SI unit: s) is a piecewise function of the wall distance,
In the Discrete random walk model (Refs.
12,
20, and
21), the components of the velocity perturbation are given instantaneous values
where ζ (dimensionless) is a vector of uncorrelated Gaussian random numbers with unit variance (
Ref. 21).
However, there is a key difference in the random number sampling used to model the molecular diffusion of the Brownian Force, as opposed to the background velocity perturbation used to account for turbulent dispersion. The expression for the Brownian force includes explicit inverse-square-root dependence on the size of the time step taken by the solver. Thus, it is possible to model Brownian motion using arbitrarily small time steps and resampling the vector
ζ at each step, since the reduction in the denominator compensates for the fact that the random force has less time to act on the particle and resulting in statistical convergence of the particle diffusion rate.
However, the expression for the velocity perturbation used in the discrete random walk model for turbulent dispersion has no such dependence on the time step size. If ζ is naively sampled at each time step, then as the time step size is made arbitrarily small, the effect of the turbulent kinetic energy on the particle motion will eventually become negligibly small.
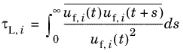
To ensure that the amount of turbulent diffusion is physically meaningful, it is important that the random vector ζ is only uniquely seeded at discrete time intervals. The length of the time interval is equal to the finite (not infinitesimally small) duration of time that the particle would spend, on average, interacting with a single eddy in the flow.
In the eddy interaction model of Gosman and Ioannides (Ref. 18), the time for which the random unit vector remains in a fixed direction, here called the eddy interaction time and denoted
τi, is taken as the lesser of two different time scales,
The eddy lifetime τe (SI unit: s) is the approximate duration of time between the formation and destruction of individual eddies in the flow,
where CL is a dimensionless constant.
The eddy crossing time τc (SI unit: s) is the approximate time it takes for a particle’s inertia to carry it across an eddy.
where τp is again the particle velocity response time, originally introduced in
Equation 5-2 for the drag force. For Stokes drag, recall that
In order to define a random number seed that only changes at time intervals greater than the eddy interaction time τi, the
Discrete random walk model defines an auxiliary dependent variable
N (dimensionless) for the number of eddies encountered by a particle in the flow. The variable
N is solved computed along the particle’s trajectory by integrating the first-order equation
The expression floor(N) is then used instead of the instantaneous time
t as an argument in the random number seed used to compute the Gaussian random numbers
ζi. An expression such as
randomnormal(floor(N)) only takes on a new value for each integer value that
N exceeds.
|
|
To ensure statistical convergence of the Discrete Random Walk model, the time steps taken by the solver should be significantly smaller than the average eddy lifetime, usually by an order of magnitude or more.
|