The Slot Joint has three rotational and one translational degrees of freedom between the two attached components. The components are free to rotate relative to each other about all three axes and also free to translate along the joint translation axis. The slot joint can be seen as a combination of the prismatic joint and the ball joint.
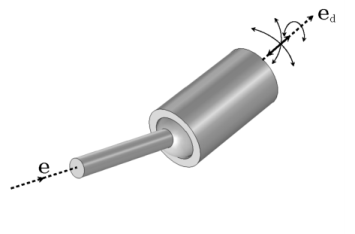
where ed2 and
ed3 are second and third axis of the destination coordinate system, respectively. In this case, the stiffness and damping matrices are given along the destination axes when the joint coordinate system is selected.