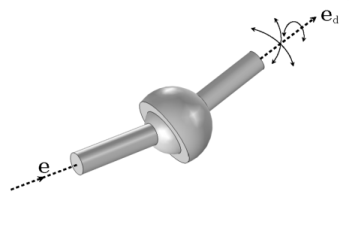
The Ball Joint, also known as a spherical joint, has three rotational degrees of freedom between the two attached components. The two components are free to rotate relative to each other along all three axes.
You specify the initial source axis (e10) and initial destination axis (
ed10) in terms of components along the axes of the selected coordinate system. The initial source axis must point toward the center of joint, whereas the initial destination axis must point away from the center of joint.