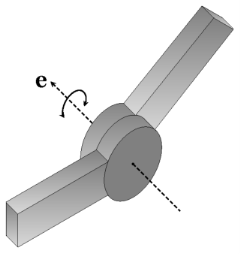
The Hinge Joint, also known as a revolute joint, has one rotational degree of freedom between the two components. The two components are free to rotate relative to each other about the axis of the joint.
In 2D, the initial joint axes (e10,
e20, and
e30) are always global spatial axes with the initial joint axis (
e10) being the out-of-plane axis (
ez):