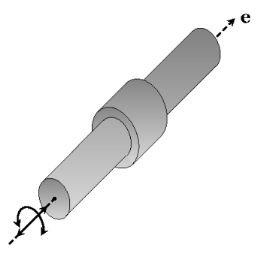
The Cylindrical Joint has one translational and one rotational degree of freedom between the two connected components. The components are free to slide and rotate relative to each other along the axis of joint. A cylindrical joint can be thought of as a combination of a prismatic joint and a hinge joint.
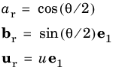
The relative quaternion (ar,
br) and the relative displacement vector (
ur) in the global spatial coordinate system are defined as: