The Locking feature is used to lock the relative motion between the two components connected to a joint. You specify limits on the relative motion in the form of an upper and lower bound. This can be interpreted as an imaginary object (like a snap hook) that locks one of the free relative degrees of freedom of the destination attachment when it reaches the limiting value.
The Locking feature differs from Constraints in a sense that the value of the particular joint degrees of freedom becomes constant for the rest of the analysis once it attains its prescribed limiting value.
In this locking type, a lock is applied to the relative displacement (u). Once the lock is active, its relative displacement becomes constant at the prescribed limiting value and the relative velocity goes to zero. If lock conditions are active for all the joint degrees of freedom, then the source and destination attachment moves as a single object.
You prescribe the maximum (umax) and minimum (
umin) limits of relative displacement. The activation condition for locking is:
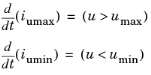
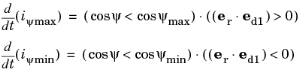
The locking indicators (iumax and
iumin) are ODE variables used to ensure that the lock is active for the rest of the simulation. The values of the indicators are switched from zero to a nonzero value once the lock is active, through the following equations:
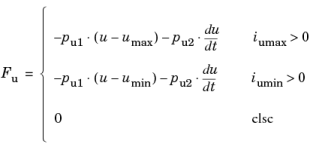
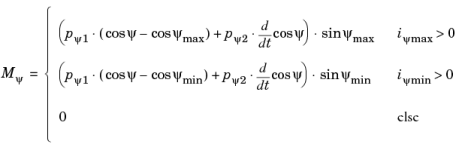
where pu1 and
pu2 are the penalty factors.
pu1 can be interpreted as a spring constant and its default value is a function of an equivalent Young’s modulus and geometric dimensions.
pu2 is a damping coefficient and its default value is 10 ms times the value of
pu1. these penalty factors are inputs and can you can modify them as required.
The value of the penalty factor (pu2) controls the rate of decay of the relative velocity. A large value gives a high rate of decay but can cause convergence problems.
In the case of a Planar Joint, the relative displacement is locked along a user-defined axis (the
locking direction) oriented in a plane perpendicular to the joint axis. The relative displacement in the locking direction,
ul, is:
where el is the normalized locking axis given by the user.