The Optimization Solver node (

) contains settings for selecting a gradient-based optimization method and specifying related solver properties:
The Optimality tolerance,
Maximum number of model evaluations, and
Method settings are fundamental and can be controlled from an
Optimization study step.
Choose to let an Optimization study step control the fundamental optimization method settings (the default). For
User Defined specify the settings directly in this node.
Specify the Optimality tolerance, which has default value
1e-3. See
About Gradient-Based Solvers. Note that this can be too strict, in particular if the forward multiphysics model is not solved accurately enough. See
About Optimality Tolerances.
Specify the Maximum number of model evaluations, which defaults to 1000. This number limits the number of times the objective function is evaluated, which in most cases is related to the number of times the multiphysics model is simulated for different values of the optimization control variable. Note, however, that it is not equal to the number of iterations taken by the optimizer because each iteration can invoke more than a single objective function evaluation. Furthermore, by setting this parameter to a smaller value and calling the optimization solver repeatedly, you can study the convergence rate and stop when further iterations with the optimization solver no longer have any significant impact on the value of the objective function.
The four available choices are SNOPT (the default),
IPOPT,
MMA, and
Levenberg–Marquardt. The Levenberg–Marquardt method can only be used for problems of least-squares type without constraints, and it is not supported for eigenvalue problems. SNOPT, IPOPT, and MMA can solve any type of optimization problem. See
About Gradient-Based Solvers.
This setting controls the behavior when the solver node under the Optimization solver node returns a solution containing more than one solution vector (for example, a frequency response). If the gradient step is an eigenvalue study step, the Auto setting correspond to
Use first — namely, only the first eigenvalue and eigenfunction are used. The SNOPT, IPOPT, and Levenberg–Marquardt solvers, except for the eigenvalue study step, only support the
Auto setting, meaning in practice the sum over frequencies and parameters or the last time step. For MMA, the options are as for the derivative-free solvers:
Auto,
Use first,
Use last,
Sum of objectives,
Minimum of objectives, and
Maximum of objectives. The last two settings make the MMA algorithms handle maximin and minimax problems efficiently.
When SNOPT, IPOPT, or MMA is used, the expression used as objective function can be controlled through this setting. The default is All, in which case the sum of all objective contributions not deactivated in an
Optimization study step are used as objective function.
By selecting Manual, you can enter an expression that is used as the objective function in the
Objective expression field. The expression
all_obj_contrib represents the sum of all objective contributions not deactivated in a controlling
Optimization study step. Hence, this expressions leads to the same optimization problem as selecting
All. Note, however, that MMA treats least-squares objective contributions in a more efficient way when
All is selected.
SNOPT, IPOPT, MMA, and Levenberg–Marquardt are gradient-based methods. The gradient can be computed according to the choices Automatic, analytic (the default);
Forward;
Adjoint;
Forward numeric; and
Numeric. Moreover, only the
Forward and
Numeric methods are supported for eigenvalue solvers. When
Automatic, analytic is chosen, either the
adjoint method or the
forward method is used to compute the gradient analytically. The adjoint method is used when the number of control variables is larger than the number of objective functions plus the number of global and integral constraints plus two, otherwise the forward method is used.
It is also possible to explicitly choose to use either the adjoint or forward method using the corresponding alternatives from the menu. With the option Forward numeric, a semianalytic approach is available where the gradient of the PDE residual with respect to control variables is computed by numerical perturbation and then substituted into the forward analytic method. When
Numeric is chosen, finite differences are used to compute the gradient numerically.
For the Forward and
Forward numeric gradient methods a
Forward sensitivity rtol factor can be specified. This factor multiplied by the forward problem relative tolerance to calculate the relative tolerance for the sensitivity solver. You can also specify a
Forward sensitivity scaled atol, which is a global absolute tolerance that is scaled with the initial conditions. The absolute tolerance for the sensitivity solution is updated if scaled absolute tolerances are updated for the forward problem.
When the Numeric gradient method is selected, you can further specify a
Difference interval (default
1.5E-8). This is the relative magnitude of the numerical perturbations to use for first-order gradient approximation in
SNOPT and for all numeric differentiation in the other solvers.
SNOPT automatically chooses between first- and second-order gradient approximations, using the specified relative
Central difference interval (default
6.0E-6) for central differencing.
For the MMA,
IPOPT, and
Levenberg–Marquardt methods you can choose the
Gradient approximation order explicitly. Selecting
First gives a less accurate gradient, while selecting
Second gives a better approximation of the gradient. However,
Second requires twice as many evaluations of the objective function for each gradient compared to
First. In many applications, the increased accuracy obtained by choosing
Second is not worth this extra cost.
The sensitivity of the objective function is by default stored in the solution object such that it can be postprocessed after the solver has completed. To save memory by discarding this information, change Store functional sensitivity to
Off. If you instead choose
On for results while solving, sensitivity information is also computed continuously during solution and made available for probing and plotting while solving. This is the most expensive option.
When using SNOPT, you have the possibility to specify which solver to use for solving linear systems containing a reduced Hessian approximation, which is in principle a full matrix. Solving a system involving this matrix is necessary in order to take a single step in the active-set algorithm used for solving the QP subproblems that are formed during each major SQP iteration. Select one of the following strategies from the
QP Solver list:
|
•
|
Cholesky — This option computes the full Cholesky factor of the reduced Hessian at the start of each major iteration. As the QP iterations (minor iterates) proceed, the dimension of the Cholesky factor changes with the number of superbasic variables and the factor is updated accordingly. If the number of superbasic variables increases beyond a preset limit (1000), the reduced Hessian cannot be stored and the solver switches to conjugate gradient.
|
|
•
|
Conjugate gradient — This method uses the conjugate-gradient method to solve all systems involving the reduced Hessian, which is only accessed implicitly in the form of a black-box linear operator on the superbasic variables. Since no data is stored between inner iterations, the method is most appropriate when the number of superbasics is large but each QP subproblem requires relatively few minor iterations. Selecting Conjugate gradient also triggers a limited-memory procedure which stores only a fixed number of BFGS update vectors together with a diagonal Hessian approximation between major iterations.
|
|
•
|
Quasi-Newton — This method uses a quasi-Newton strategy to update an approximation of the Cholesky factor of the reduced Hessian as the iterations proceed. It has the same memory requirement as the Cholesky option but does not recompute the complete Cholesky factor at the beginning of each major iteration. It can be an appropriate choice when the number of superbasics is large but the nonlinear problem is well scaled and well behaved so that relatively few major iterations are needed for the approximate Hessian to stabilize.
|
In the Use step condition field you can enter an expression that tells the optimization solver to reduce the step length in the current linesearch used by SNOPT to generate the next iterate.
You can specify a linesearch tolerance as a value between 0 and 1 in the Linesearch tolerance field (default value: 0.9). This controls the accuracy with which a step length will be located along the direction of search in each iteration. At the start of each linesearch, a target directional derivative for the merit function is identified. This parameter determines the accuracy to which this target value is approximated:
From the Linesearch strategy list, choose
Derivative (the default) or
Nonderivative. At each major iteration a linesearch is used to improve the merit function. A derivative linesearch uses safeguarded cubic interpolation and requires both function and gradient values to compute estimates of the step. If some analytic derivatives are not provided, or a nonderivative linesearch is specified, SNOPT uses a linesearch based on safeguarded quadratic interpolation, which does not require gradient evaluations.
Absolute tolerance on the dual infeasibility, see The IPOPT Solver. Successful termination requires that the max-norm of the dual infeasibility is less than the
Dual infeasibility absolute tolerance (the default value is 1).
Absolute tolerance on the constraint violation, see The IPOPT Solver. Successful termination requires that the max-norm of the constraint violation is less than the
Constraint violation absolute tolerance (The default value is 0.1).
Absolute tolerance on the complementarity, see The IPOPT Solver. Successful termination requires that the max-norm of the complementarity is less than the
Complementary conditions absolute tolerance (the default value is 0.1).
You can choose a Linear Solver for the step computations. The options are
MUMPS and
PARDISO. The default value is
MUMPS.
If MUMPS is selected, you can choose
Percentage increase in the estimated working space. The default value is 1000. A small value can reduce memory requirements at the expense of computational time.
The Move limits option makes it possible to bound the maximum absolute change for any (scaled) control variable between two outer iterations This is particularly relevant, when the 1987 version of the algorithm is used, because this does not have an inner loop to ensure improvement of the objective and satisfaction of constraints.
By default, the MMA solver continues to iterate until the relative change in any control variable is less than the optimality tolerance. If the Maximum outer iterations option is enabled, the solver stops either on the tolerance criterion or when the number of iterations is more than the maximum specified.
The Optimization Module’s globally convergent version of the MMA solver has an inner loop which ensures that each new outer iteration point is feasible and improves on the objective function value. By default, the Maximum number of inner iterations per outer iteration is
10. When the maximum number of inner iterations is reached, the solver continues with the next outer iteration. It is possible to use the classical implementation of the MMA solver without inner iterations by clearing the
Globally Convergent MMA checkbox.
The Internal tolerance factor is multiplied by the optimality tolerance to provide an internal tolerance number that is used in the MMA algorithm to determine if the approximations done in the inner loop are feasible and improve on the objective function value. The default is 0.1. Decrease the factor to get stricter tolerances and a more conservative solver behavior.
The MMA algorithm penalizes violations of the constraints by a number that is calculated as the specified Constraint penalty factor times
1e-4 divided by the optimality tolerance. Increasing this factor for a given optimality tolerance forces the solver to better respect constraints, while relatively decreasing the influence of the objective function.
By default, the Levenberg–Marquardt solver terminates on the controls or the angle between the defect and the Jacobian, but if Terminate also for defect reduction is enabled, the solver will also terminate, if the sum of squares has been reduced by a factor equal to the product of the optimality tolerance and the
Defect reduction tolerance factor.
This section only appears, if the Adjoint gradient method is chosen in the
Optimization Solver section. You can choose between two solver types:
|
•
|
Time discrete (the default) forces the adjoint time integration to use the same time steps and the accuracy is comparable to stationary sensitivity, but there can still be a need for recomputation of the forward solution.
|
|
•
|
Time continuous allows the forward and adjoint time integration to use different time steps.
|
|
•
|
Automatic (the default) the number of checkpoints is controlled by specifying the Maximum in-core memory (KB). Note that specifying a large value can result in poor performance, unless manual time stepping is used.
|
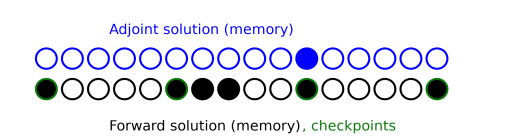
Manual the number of checkpoints is controlled by specifying the maximum number of
Forward solutions between checkpoints and in practice this means that the number of checkpoints is identical to the number of steps taken by the solver divided by the number given in this setting. The maximum number of stored forward solutions at anytime will then be the number of checkpoints plus the value given in the setting. Recomputation of the forward solution can thus be avoided by setting a value larger than the number of time steps used for the forward problem, but this also maximizes the memory consumption, see
Figure 5-1. Conversely, the memory consumption will be minimized if the number of checkpoints is set to the square root of the number of time steps used for the forward problem.
When Time continuous is chosen, the backward time stepping can be chosen as
|
•
|
Automatic (the default) try to determine the optimal time stepping automatically based on the tolerance.
|
|
•
|
From forward uses the times steps from the forward problem, but can swap the order of steps by choosing Use step-length from forward stepping. You can also choose the BDF order.
|
|
•
|
Manual allows complete control using the BDF order, Initial step fraction, Initial step growth rate, and the Time step. Only positive numbers are allowed, except for the Time step, which only accepts negative numbers.
|
The Tolerances of the backward time stepping is determined automatically by default, but it is also possible to manually specify the
Adjoint rtol factor and
Adjoint scaled atol factors, which control the accuracy of the adjoint solution, similarly to the corresponding Forward sensitivity factors. In addition an
Adjoint quadrature rtol factor and an
Adjoint quadrature atol can be given. These settings control the relative and absolute accuracy of time integrals (or quadratures) used to calculate objective function gradients. Note that the absolute tolerance is unscaled.
Select the Plot checkbox to plot the results while solving the model. Select a
Plot group from the list and any applicable
Probes.
Use the Compensate for nojac terms list to specify whether to try to assemble the complete Jacobian if an incomplete Jacobian has been detected. Select:
|
•
|
Automatic (the default) to try to assemble the complete Jacobian if an incomplete Jacobian has been detected. If the assembly of the complete Jacobian fails or in the case of nonconvergence, a warning is written and the incomplete Jacobian is used in the sensitivity analysis for stationary problems. For time-dependent problems, an error is returned.
|
|
•
|
On to try to assemble the complete Jacobian if an incomplete Jacobian has been detected. If the assembly of the complete Jacobian fails or in the case of nonconvergence, an error is returned.
|
|
•
|
Off to use the incomplete Jacobian in the sensitivity analysis.
|
From the Adjoint solution choose
Initialize with zero solution (the default) or
Initialize with forward solution. The latter option can reduce the computational time, if the problem is self-adjoint and an iterative solver is used. This typically happens in linear structural mechanics when the total elastic strain energy variable (
Ws_tot) is used as objective. The option only affects the adjoint problem of stationary solvers.
In this section you can define constants that can be used as temporary constants in the solver. You can use the constants in the model or to define values for internal solver parameters. Click the Add (

) button to add a constant and then define its name in the
Constant name column and its value (a numerical value or parameter expression) in the
Constant value column. By default, any defined parameters are first added as the constant names, but you can change the names to define other constants. Click
Delete (

) to remove the selected constant from the list.
The Log displays the information about the progress of the solver. See
The Optimization Solver Log.