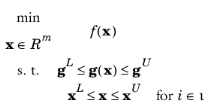
where f is the objective,
x are the controls,
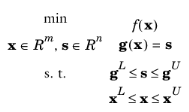
g is the constraint function. IPOPT reformulates the problem to eliminate inequality constraints by introducing the slack variables,

, with bounds,

, and the auxiliary equation,
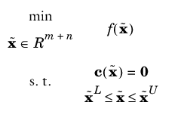
g(x)=s. The equivalent reformulation is
where 
,

and

are Lagrange variables associated with the equality and inequality constraints, respectively.
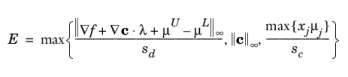
where sd and
sc are internal scales that serve to avoid numerical problems