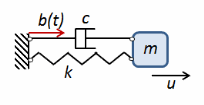
For given values of ω0,
ζ, and
b(
t), it is a trivial task to solve
Equation 3-168 for the whole duration of the event plus some extra time to allow for the response to reach a possible maximum. The acceleration, velocity, and displacement response spectra are defined as
These are absolute spectra. One can do a similar definition of the
relative spectra by using instead the relative displacement
ur. It is clear from the definition that there is not a one-to-one relation between the response spectrum and the base acceleration history. The response spectrum gives information about the peak value, but not about when it occurs.
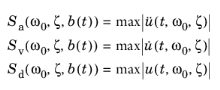
Let b(
t) be a vector that has the same size as the displacement vector
u (the total number of DOF), but it contains only three different values:
bx(
t) in all
x-translation DOFs,
by(
t) in all
y-translation DOF, and
bz(
t) in all
z-translation DOF. The relative displacement is now
ur = u − b. With no external load,
Equation 3-169 can be written as
In Equation 3-170, qj is the modal coordinate for mode
j, so that the relative displacement can be written as a superposition of the eigenmodes

.
The notation 1x mean a vector that has the value 1 in all DOF representing x-translation, and the value 0 in all other DOF. Inserting
Equation 3-171 in
Equation 3-170 gives
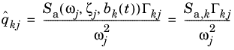
The multipliers Γkj are the modal participation factors defined as
Thus, the maximum amplitude of mode j, when loaded by a base motion described by a response spectrum in direction
k, is
The general approach is to consider the excitation in three directions, I, (
I = 1,2,3) separately. First all modal responses are summed for each direction, and then the results for the three directions are summed. Some methods, however, do both combinations in one sweep.
In a high frequency mode, the mass of the SDOF oscillator will mainly be translated in phase with the support. Such modes constitute the rigid modes. Their responses are synchronous with each other (and with the base motion). This means that for rigid modes, a pure summation should be used, since they are fully correlated.
In addition, it is sometimes necessary to add some static load cases, containing a missing mass correction. The reason is that when only a limited set of eigenmodes is used in the superposition, those modes do not represent the total mass of the structure.
In the following, RI denotes any result quantity caused by excitation in direction
I.
RI can be for example be displacement, velocity, acceleration, strain component, stress component, equivalent stress, or a beam section force. The periodic part of
RI is denoted
RpI, and the rigid part is denoted
RrI. Similarly,
RpI,j and
RrI,j denote the results from an individual eigenmode
j.
The difference between the two methods lies in how the coefficients αj are determined. For low frequencies, it should approach the value 0 (fully periodic modes). And for high frequencies, the value is 1 (fully correlated rigid modes).
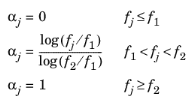
In the Gupta method, αj is a linear function of the logarithm of the natural frequency.
where f1 and
f2 are two key frequencies. Thus, for eigenfrequencies below
f1, the modes are considered as purely periodic, and above
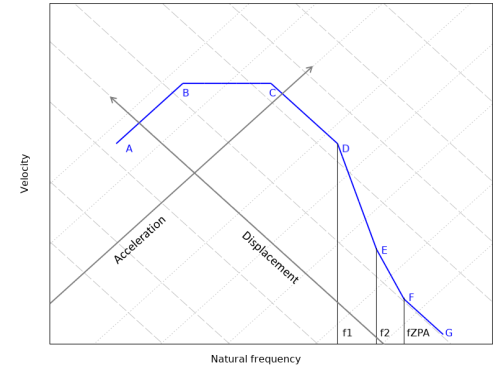
f2 as purely rigid. In the original Gupta method, the lower key frequency is given by
where Sa,max and
Sv,max are the maximum values of the acceleration and velocity spectra, respectively. In the idealized spectrum shown in
Figure 3-36, this exactly matches the point D.
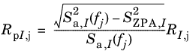
In the Lindley–Yow method, the coefficient αj depends directly on the response spectrum values, and not only on the frequency. As a consequence, it is possible that a certain mode can be considered as having a different degree of rigidness for different excitation directions
The so-called zero period acceleration (ZPA) is the maximum ground acceleration during the event
The value of αj must be in the range from 0 to 1, and it must increase with frequency. For this reason, NRC RG 1.92 requires that
αj must be set to zero for any eigenmodes below point C in
Figure 3-36. For a general spectrum, this is implemented as a strict requirement that
αj has a monotonous decrease with decreasing frequency from
fZPA. As soon as an increase in
αj is found, the value is set to zero for all lower frequencies.
Here, RpI is the total periodic response of some result quantity
R with respect to excitation in direction
I (
I = 1, 2, 3).
RpI,j is the result from an individual eigenmode
j, and
N modes are used in the summation. The interaction between the modes is determined by the coefficient
Cij (
0 ≤Cij≤1). The different evaluation methods vary only in the definition of
Cij.
Since Cij is symmetric and
Cij = 1 when
i =
j, it is more efficient to use the expression
The result quantity R is computed using the ordinary definitions of how a variable is obtained from the DOF fields. This can be expressed as
R =
g(u). The operator
g is however applied to the mode shape, multiplied by a scalar (spectrum value times participation factor)
where ζi is the modal damping. In the implementation in COMSOL Multiphysics, all modes are assumed to have the same damping.
where td is a separate input, called the time of duration. The value of
ζi differs between modes, even though the damping is constant.
This method, which is often called complete quadratic combination (CQC), is similar to the previous double sum method. The general expression contains modal damping values. Given that a single damping value is used here, the mode correlation expression can be simplified to
where Rmm,I is the term for the missing mass correction, if used.
Here, f is the original load vector,
M is the mass matrix, and
rk are the modal loads, given by the projection of the load vector on the eigenmodes
ϕ,
To actually compute the load in Equation 3-173, the participation factors from a corresponding eigenfrequency study step are needed. The structure of the load is similar to that of a gravity load, but with the acceleration of gravity replaced by the space-dependent field
The load is implemented by using Gravity nodes in the Structural Mechanics interface. The sum of the products between participation factors and mode shapes is performed in a
Combined Solutions study step.
The X direction is not a property of the geographical location, but should be chosen as the one giving the worst case for a certain structure. The loading direction which causes the highest response may however not be the same for different result quantities, or for different locations in the structure. For some structures, there is an obvious “weak” direction which can then be chosen as
X direction. More often, this is not the case. There are then three possible approaches:
the same ratio γ will apply to the responses. The peak response as function of the rotation angle is obtained by an SRSS type summation
It can be seen that for γ =
1, the standard SRSS expression is retrieved.
The angle θmax giving the maximum response
R(
θmax) turns out to be independent of
γ, and it has the value
There are two roots for θmax, both of which must be checked.