Damped eigenfrequencies can also be studied, so λ is not necessarily a purely imaginary number. Any damping included in the problem will automatically cause the eigenfrequencies to become complex valued.
In addition to the eigenfrequency, the quality factor, Q, and decay factor,
δ, for the model can be examined:
where Mnm is the mass matrix, and
ϕi is the eigenmode in terms of a vector of degrees of freedom. The modal participation factors are defined as
where L represents a unit length.
The integration involves the entire selection of the corresponding physics interface. The definition of dm in the above formulas depends on the dimensions. For example, one has
dm = ρdV for solid domains in 3D. Contributions to the structural mass come not only from the mass density of the domains, but also from features like
Rigid Connector,
Added Mass,
Point Mass, and so on. Thus, integrations are in general performed over all selected domains, boundaries, and edges. Contributions from points are also added.
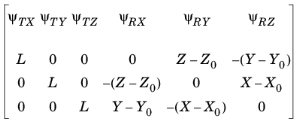
Note that the rotational participation factor computed with respect to a certain reference point r0 can be expressed in terms of the participation factors computed with respect to the origin as:
where matrix J presents the moment of inertia, and
are rotation angles with respect to the corresponding axes. The angles can be computed at given local position as certain functions of the actual rotational degrees of freedom which can be different for different structural element types.
where M denotes a unit mass. The advantage of such definition is independence of the normalization type selected when computing the eigenmodes.
The effective modal mass for X-translation and rotation are defined, respectively, as