Since the deformation tensor F is a two-point tensor, it combines both spatial and material frames. It is not symmetric. Applying a singular value decomposition on the deformation gradient tensor gives an insight into how much stretch and rotation a unit volume of material has been subjected to. The
right polar decomposition is defined as
where U is the
right stretch tensor given in the material frame, and
R is a proper orthogonal tensor such that
det(
R) = 1 and
R-1 =
RT. The rotation tensor
R describes the rigid rotation, and all information about the deformation of the material is contained in the symmetric tensor
U.
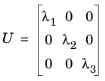
The stretch tensor contains physically important information about the deformation state. The eigenvalues of the U tensor are the principal stretches,
λ1,
λ2, and
λ3. The stretch of a line element with initial length
L0 and current length
L is
where εeng is the engineering strain. The three principal stretches act along three orthogonal directions. In the coordinate system defined by these principal directions, the
U tensor will be diagonal:
It is a symmetric and positive definite tensor, which accounts for the strain but not for the rotation. The eigenvalues of the C tensor are the squared principal stretches, thus providing a more efficient way to compute the principal stretches than by using the stretch tensor
U directly.
The Green–Lagrange strain tensor is a symmetric tensor defined as
Since C is independent of rigid body rotations, this applies also to the Green–Lagrange strain tensor.
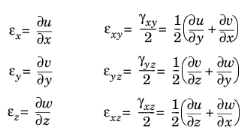
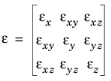
The symmetric strain tensor ε consists of both normal and shear strain components:
A special problem occurs at the axis of rotation, where both u and
r are zero. To avoid dividing by zero, the circumferential strain is for very small values of
r redefined to
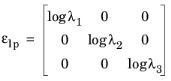
The logarithmic strain, also called true strain, or
Hencky strain, is a popular strain measure for large strain, in particular when representing data from tensile tests. For a uniaxial case, it is defined on the incremental form
where L is the current length of the specimen. If this relation is integrated, the total strain can be written as
Here L0 is the initial length and
λ is the stretch.