You are viewing the documentation for an older COMSOL version. The latest version is
available here.
The Shell (shell) interface (

), found under the
Structural Mechanics branch (

) when adding a physics interface, is used to model structural shells on boundaries in 3D or 2D axisymmetry. Shells are thin flat or curved structures, having significant bending stiffness. The interface uses shell elements of the MITC type, which can be used for analyzing both thin (Kirchhoff theory) and thick (Mindlin theory) shells.
The Plate (plate) interface (

), found under the
Structural Mechanics branch (

) when adding a physics interface, provides the ability to model structural plates in 2D. Plates are thin flat structures with significant bending stiffness, being loaded in a direction out of the plane.
|
|
The Shell interface is for 3D and 2D axisymmetry models.
The Plate interface is for 2D models — domains are selected instead of boundaries, and boundaries instead of edges. Otherwise the Settings windows are similar to those for the Shell interface.
|
When this interface is added, these default nodes are also added to the Model Builder —
Linear Elastic Material,
Thickness and Offset,
Free (a boundary condition where edges are free, with no loads or constraints), and
Initial Values. Then, from the
Physics toolbar, add other nodes that implement, for example, boundary conditions. You can also right-click
Shell or
Plate to select physics features from the context menu.
The Label is the default physics interface name.
The Name is used primarily as a scope prefix for variables defined by the physics interface. Refer to such physics interface variables in expressions using the pattern
<name>.<variable_name>. In order to distinguish between variables belonging to different physics interfaces, the
name string must be unique. Only letters, numbers, and underscores (_) are permitted in the
Name field. The first character must be a letter.
The default Name (for the first physics interface in the model) is
shell or
plate.
In the Sketch section, a conceptual sketch of the degrees of freedom in the Shell and Plate interfaces appears.
|
|
Select Circumferential mode extension to prescribe a circumferential wave number to be used in eigenfrequency or frequency-domain studies. When selected, enter the Azimuthal mode number m.
|
From the Structural transient behavior list, select
Include inertial terms (the default) or
Quasistatic. Use
Quasistatic to treat the dynamic behavior as quasi static (with no mass effects; that is, no second-order time derivatives). Selecting this option gives a more efficient solution for problems where the variation in time is slow when compared to the natural frequencies of the system. The default solver for the time stepping is changed from Generalized alpha to BDF when
Quasistatic is selected.
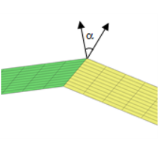
The fold-line limit angle α is the smallest angle between the normals of two boundaries that makes their intersection to be treated as a fold line. The normal to the shell is discontinuous along a fold-line. Enter a value or expression in the
α field. The default value is 0.01 radians (approximately
0.6 degrees). The value must be larger than 0, and less than
π/2, but angles larger than a few degrees are not usually meaningful.
Enter a number between -1 and 1 for the Local z-coordinate [-1,1] for thickness-dependent results Z. The value can be changed from
−1 (downside) to
+1 (upside). The default is +1. A value of 0 means the midsurface of the shell. This is the default position for stress and strain evaluation during the results analysis. During the results and analysis stage, the coordinates can be changed in the
Parameters section in the result features.
To display this section, click the Show More Options button (

) and select
Advanced Physics Options in the
Show More Options dialog box. Normally these settings do not need to be changed.
The Use MITC interpolation check box is selected by default, and this interpolation, which is part of the MITC shell formulation, should normally always be active.
|
|
For the Plate interface, the Use 3D formulation check box is used to select whether six or three variables are used in the formulation. For geometrically nonlinear analyses, or when in-plane (membrane) forces are active, six variables must be used. This check box is selected by default.
|
Select the Rigid connectors check box to group in the solver node the variables added by the
Rigid Connector feature.
Select the Attachments check box to group in the solver node the variables added by the
Attachment feature.
The selection made in the Advanced Settings section can be overridden by the settings in the
Advanced section of the
Rigid Connector or
Attachment features.
This section will only be displayed if a mesh on NASTRAN® format, containing RBE2 elements, has been imported in an Import node under
Mesh. The purpose is to automatically create rigid connectors from RBE2 elements in the NASTRAN file.
In the drop-down menu in the section title, you can select Create Rigid Connectors from RBE2. The effect is that one rigid connector will be created for each RBE2 element in the imported file. This will happen for all physics interfaces in the
Interfaces list. Supported interfaces are: Solid Mechanics, Shell, Beam, and Multibody Dynamics. If there are RBE2 elements spanning more than one physics interface, they will be automatically connected.
The Automated Model Setup section is present in the Solid Mechanics, Shell, and Beam interfaces. In a model that contains several physics interfaces, you should use the automated model setup from only one of them, and make sure that all the involved interfaces are selected in the
Interfaces list.
Select the order of the Displacement field —
Linear or
Quadratic. The degrees of freedom for the displacement of the shell normals will always have the same shape functions as the displacements.
Both interfaces define two dependent variables (fields) — the displacement field u and the field of normal displacements
ar. The names can be changed, but the names of fields and dependent variables must in general be unique within a model. If you intentionally use the same name for fields from different physics interfaces, these degrees of freedom are treated as being the same. This can be used when mixing different type of structural mechanics interfaces, where you often want the displacements to be the equal.