The Slip condition assumes that there are no viscous effects at the slip wall and hence, no boundary layer develops. From a modeling point of view, this is a reasonable approximation if the important effect of the wall is to prevent fluid from leaving the domain. Mathematically, the constraint can be formulated as:
For a moving wall with translational velocity utr,
u in the above equations is replaced by the relative velocity
urel = u−utr.
The Porous slip option, which can be chosen in the
Porous treatment of no slip condition list when
Enable porous media domains is activated, results in a special treatment of
Wall boundaries and
Interior Wall boundaries adjacent to porous domains (
Porous Medium feature). Namely, similar to the
Navier slip boundary condition, no penetration and tangential stress conditions are applied at the wall:
The normalization makes u have the same magnitude as
uw even if
uw is not exactly parallel to the wall.
where μ is the fluid’s dynamic viscosity (SI unit: Pa·s),
αv represents the tangential momentum accommodation coefficient (TMAC) (dimensionless), and
λ is the molecules’ mean free path (SI unit: m). The tangential accommodation coefficients are typically in the range of 0.85 to 1.0 and can be found in
Ref. 17.
where Ls, the slip length (SI unit: m), is a straight channel measure of the distance from the boundary to the virtual point outside the flow domain where the flow profile extrapolates to zero. This equation holds for both liquids and gases.
where σT is the thermal slip coefficient (dimensionless) and
ρ is the density of the fluid. The thermal slip coefficients range between 0.3 and 1.0 and can be found in
Ref. 17.
where the components of K are the Lagrange multipliers that are used to implement the boundary condition. Similarly, the tangential temperature gradient results from the difference of the gradient and its normal projection:
where μeo is the electroosmotic mobility and
Et is the fluid electric field tangential to the wall.
Use the Electroosmotic mobility μeo (SI unit: m
2/(s·V)) Built-in expression to compute the electroosmotic mobility from:
Here εr is the fluid’s relative permittivity,
ε0 the permittivity of free space (SI unit F/m), which is a predefined physical constant,
ζ is the fluid’s zeta potential (SI unit: V), and
μ the fluid’s dynamic viscosity (Pa·s). Typically
μeo≈7
×10
-8m
2/(s·V) and
ζ≈100 mV (see H. Bruus,
Theoretical Microfluidics, Oxford University Press, 2008). See
Wall for the node settings.
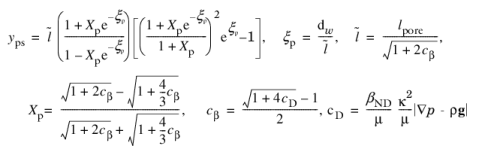
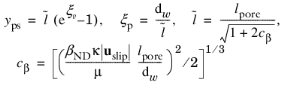
where  ,
,  and K
and K is the viscous stress tensor.
β is a slip length, and

is the velocity tangential to the wall. The boundary condition does not set the tangential velocity component to zero; however, the extrapolated tangential velocity component is 0 at a distance
β outside the wall.
The Slip Length setting is per default set to
Factor of minimum element length. The slip length
β is then defined as

, where

is the smallest element side (corresponds to the element size in the wall normal direction for boundary layer elements) and

is a user input.
In cases where the wall movement is nonzero, Account for the translational wall velocity in the friction force may be selected to use

instead of

in the friction force. Then, the extrapolated tangential velocity component is

at a distance
β outside of the wall. Note that the
Velocity of sliding wall uw is always accounted for in the friction force.