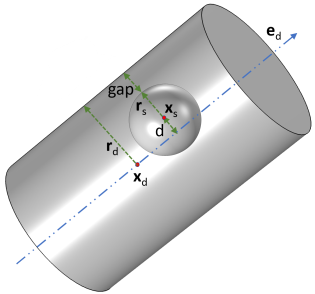
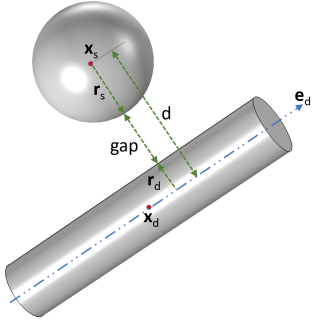
Here, d is the shortest distance between source center and destination axis,
rs is the radius of the source sphere, and
rd is the radius of the destination cylinder.
Here, Xsrc and
Xdst are the undeformed locations of the source and destination centers, and
usrc and
udst are the corresponding displacements.
ed is the direction vector of the destination axis.