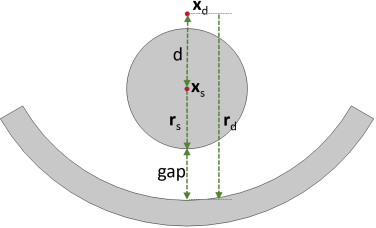
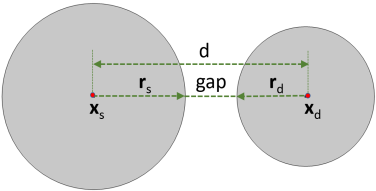
Here, d is the distance between source and destination centers,
rs is the radius of the source sphere, and
rd is the radius of the destination sphere.
Here, Xsrc and
Xdst are the undeformed locations of the source and destination centers, and
usrc and
udst are the corresponding displacements.
where pn is the penalty factor. If the penalty factor control is automatic, the value of
pn is calculated from the penalty factor control multiplier
fp as
In this expression, diag is the geometric diagonal of the geometry’s bounding box.
where 
is the time derivative of the gap distance and
pnv is the viscous penalty factor.
In this expression, diag is the geometric diagonal of the bounding box of the geometry.