|
|
|
|
108 N/m
|
||
|
•
|
|
•
|
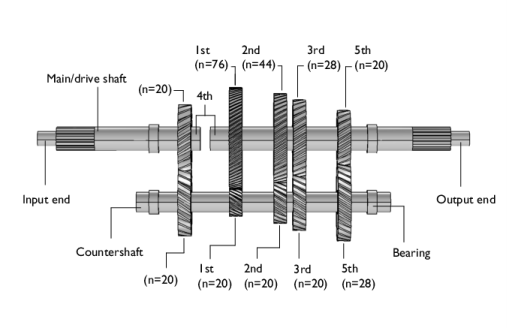
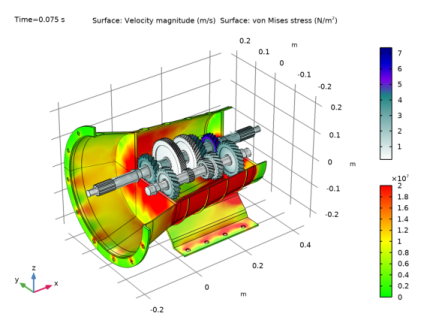
An external torque/load of 1000 Nm is applied at the output end of the drive shaft.
|
|
•
|
|
•
|
|
•
|
|
•
|
|
•
|

|
•
|
To model a synchronizing ring, a Hinge Joint node with an activation condition is used in order to fix the gears on the main shaft.
|
|
•
|
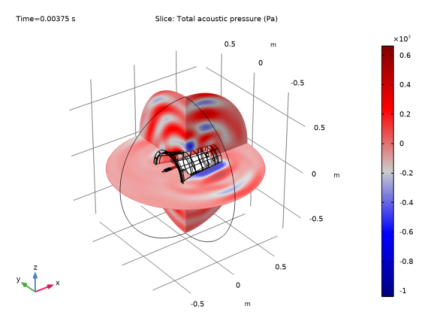
The acoustics is set up in a separate component so that the multibody model is unaffected. A General Extrusion nonlocal coupling is used to map the acceleration values between the geometries of the two components.
|
|
•
|
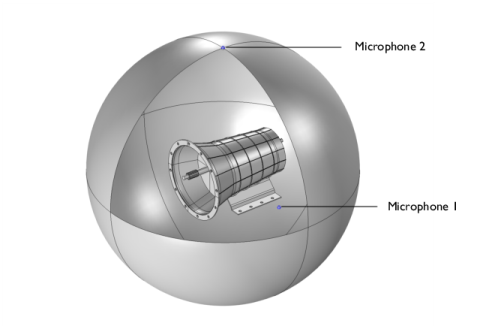
The Parameters node under Results is used for defining the location of the microphones. This way, the microphone locations can be changed without updating the solution.
|
|
1
|
|
2
|
|
3
|
Click Add.
|
|
4
|
Click
|
|
5
|
|
6
|
Click
|
|
1
|
|
2
|
|
3
|
Click Browse.
|
|
4
|
Browse to the model’s Application Libraries folder and double-click the file gearbox_vibration_noise.mphbin.
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
|
6
|
|
7
|
|
8
|
On the object fin, select Domain 4 only.
|
|
9
|
|
1
|
|
2
|
|
3
|
|
4
|
Browse to the model’s Application Libraries folder and double-click the file gearbox_vibration_noise_bearing.txt.
|
|
1
|
|
2
|
|
3
|
Locate the Parameters section. In the table, enter the following settings:
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
|
1
|
In the Model Builder window, under Component 1 (comp1) right-click Definitions and choose Variables.
|
|
2
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
|
6
|
Click OK.
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
|
6
|
Click OK.
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
|
6
|
Click OK.
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
|
6
|
Click OK.
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
In the Paste Selection dialog box, type 184-190, 193-209, 214-217, 226-240, 242-246, 533-540, 602-613, 677-680, 683-690 in the Selection text field.
|
|
6
|
Click OK.
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
|
6
|
Click OK.
|
|
7
|
|
8
|
|
1
|
|
2
|
|
3
|
|
4
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
|
1
|
In the Model Builder window, under Component 1 (comp1) right-click Multibody Dynamics (mbd) and choose Gears>Helical Gear.
|
|
3
|
In the Settings window for Helical Gear, type Helical Gear: Fourth (Counter Shaft) in the Label text field.
|
|
4
|
|
5
|
|
6
|
|
7
|
|
8
|
|
1
|
|
2
|
|
1
|
|
2
|
|
3
|
|
4
|
|
1
|
|
2
|
In the Settings window for Helical Gear, type Helical Gear: Fourth (Main Shaft) in the Label text field.
|
|
3
|
|
5
|
|
6
|
|
7
|
|
1
|
|
2
|
In the Settings window for Rigid Domain, type Rigid Domain: Main Input Shaft in the Label text field.
|
|
1
|
|
2
|
In the Settings window for Rigid Domain, type Rigid Domain: Main Output Shaft in the Label text field.
|
|
3
|
|
1
|
|
2
|
In the Settings window for Prescribed Displacement/Rotation, locate the Prescribed Rotation section.
|
|
3
|
|
4
|
Specify the Ω vector as
|
|
5
|
|
1
|
|
2
|
|
3
|
Specify the M vector as
|
|
1
|
In the Model Builder window, under Component 1 (comp1)>Multibody Dynamics (mbd) right-click Fixed Joint 5 and choose Duplicate.
|
|
2
|
|
3
|
|
4
|
|
1
|
|
2
|
|
3
|
|
4
|
|
1
|
|
2
|
|
3
|
|
4
|
|
1
|
|
2
|
|
3
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
Click OK.
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
|
6
|
|
1
|
|
2
|
In the Settings window for Attachment, type Attachment: Bearing 1 (Counter Shaft) in the Label text field.
|
|
3
|
Locate the Boundary Selection section. From the Selection list, choose Foundation 1 (Counter Shaft).
|
|
1
|
|
2
|
In the Settings window for Radial Roller Bearing, type Bearing 1 (Counter Shaft) in the Label text field.
|
|
3
|
|
4
|
|
5
|
Click OK.
|
|
6
|
|
7
|
|
8
|
Locate the Geometric Properties section. From the Bearing type list, choose Angular contact ball bearing.
|
|
9
|
|
10
|
|
11
|
|
12
|
|
13
|
|
14
|
|
15
|
Locate the Foundation Properties section. From the list, choose Attachment: Bearing 1 (Counter Shaft).
|
|
1
|
|
2
|
|
3
|
|
1
|
|
2
|
|
3
|
|
1
|
|
2
|
|
3
|
|
1
|
|
2
|
|
3
|
In the Model Builder window, expand the Study: Multibody Analysis>Solver Configurations>Solution 1 (sol1)>Dependent Variables 1 node, then click Axial rotation of rotor (comp1.mbd.rrb1.th).
|
|
4
|
|
5
|
|
6
|
|
7
|
|
8
|
|
9
|
|
10
|
|
11
|
|
12
|
|
13
|
|
14
|
|
15
|
|
16
|
|
17
|
|
18
|
|
19
|
|
20
|
|
21
|
|
22
|
|
23
|
|
24
|
|
25
|
|
26
|
|
27
|
|
28
|
|
29
|
|
30
|
|
31
|
|
32
|
|
33
|
|
34
|
|
35
|
|
36
|
|
37
|
|
38
|
|
39
|
|
40
|
|
41
|
|
42
|
In the Model Builder window, expand the Study: Multibody Analysis>Solver Configurations>Solution 1 (sol1)>Time-Dependent Solver 1 node, then click Fully Coupled 1.
|
|
43
|
|
44
|
|
45
|
|
46
|
|
1
|
|
2
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
|
6
|
Click OK.
|
|
1
|
In the Model Builder window, expand the Study: Multibody Analysis/Solution 1 (3) (sol1) node, then click Selection.
|
|
2
|
|
3
|
|
4
|
|
5
|
|
6
|
Click OK.
|
|
1
|
|
2
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
|
1
|
|
2
|
|
3
|
|
1
|
In the Model Builder window, under Results>Velocity - Stress right-click Surface 1 and choose Duplicate.
|
|
2
|
|
3
|
|
4
|
|
5
|
|
6
|
|
7
|
|
8
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
|
1
|
|
2
|
|
3
|
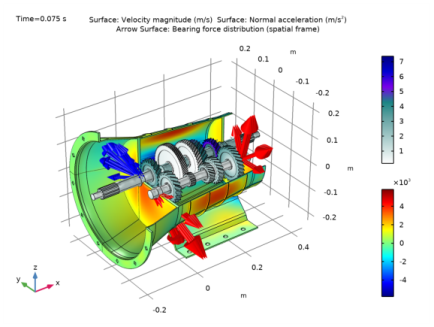
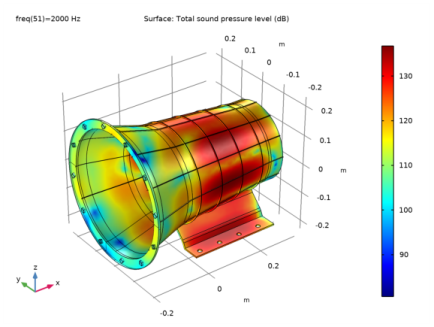
In the Settings window for 3D Plot Group, type Velocity - Normal Acceleration in the Label text field.
|
|
1
|
In the Model Builder window, expand the Results>Velocity - Normal Acceleration>Surface 2 node, then click Surface 2.
|
|
2
|
|
3
|
|
4
|
|
5
|
|
1
|
|
2
|
In the Settings window for Arrow Surface, click Replace Expression in the upper-right corner of the Expression section. From the menu, choose Component 1 (comp1)>Multibody Dynamics>Bearing 1 (Counter Shaft)>mbd.rrb1.fbx,...,mbd.rrb1.fbz - Bearing force distribution (spatial frame).
|
|
3
|
|
4
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
|
6
|
|
1
|
In the Model Builder window, under Results>Velocity - Normal Acceleration right-click Arrow Surface 1 and choose Duplicate.
|
|
2
|
|
3
|
|
4
|
Clear the Color check box.
|
|
5
|
|
6
|
|
7
|
|
8
|
|
9
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
|
1
|
In the Model Builder window, under Results>Velocity - Normal Acceleration right-click Arrow Surface 2 and choose Duplicate.
|
|
2
|
|
3
|
|
4
|
|
5
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
|
1
|
In the Model Builder window, under Results>Velocity - Normal Acceleration right-click Arrow Surface 3 and choose Duplicate.
|
|
2
|
|
3
|
|
4
|
|
5
|
|
6
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
|
6
|
|
7
|
|
1
|
|
2
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
Click OK.
|
|
6
|
|
7
|
|
8
|
|
9
|
|
10
|
|
11
|
|
12
|
|
1
|
|
2
|
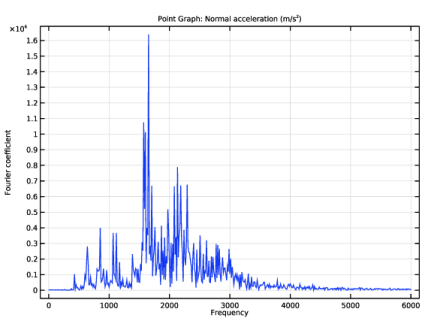
In the Settings window for 1D Plot Group, type Normal Acceleration: Frequency in the Label text field.
|
|
1
|
In the Model Builder window, expand the Normal Acceleration: Frequency node, then click Point Graph 1.
|
|
2
|
|
3
|
|
4
|
|
5
|
|
6
|
|
7
|
|
1
|
|
2
|
|
1
|
|
2
|
|
3
|
Click Browse.
|
|
4
|
Browse to the model’s Application Libraries folder and double-click the file gearbox_vibration_noise.mphbin.
|
|
1
|
|
2
|
Click in the Graphics window and then press Ctrl+A to select all objects.
|
|
1
|
|
2
|
|
3
|
|
1
|
|
2
|
Select the object sph1 only.
|
|
3
|
|
4
|
|
5
|
Select the object csol1 only.
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
|
6
|
On the object fin, select Boundary 2 only.
|
|
7
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
|
6
|
|
7
|
Click OK.
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
In the Paste Selection dialog box, type 12-20, 23-40, 43-47, 49, 53-73, 127, 132-134, 139, 144-193, 196-202, 205-207, 210-220, 223-229, 232-234, 237-244, 280-297, 299-318, 320-348, 351-356, 358-359, 361-681, 711-712, 715-720, 723-724, 727-734 in the Selection text field.
|
|
6
|
Click OK.
|
|
1
|
|
2
|
|
3
|
In the tree, select Built-in>Air.
|
|
4
|
|
5
|
|
1
|
|
2
|
|
3
|
|
4
|
Find the Physics interfaces in study subsection. In the table, clear the Solve check box for Study: Multibody Analysis.
|
|
5
|
|
6
|
|
1
|
In the Settings window for Pressure Acoustics, Frequency Domain, click to expand the Discretization section.
|
|
2
|
|
1
|
Right-click Component 2 (comp2)>Pressure Acoustics, Frequency Domain (acpr) and choose Radiation Conditions>Spherical Wave Radiation.
|
|
2
|
|
3
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
In the Show More Options dialog box, in the tree, select the check box for the node Physics>Advanced Physics Options.
|
|
6
|
Click OK.
|
|
7
|
In the Settings window for Exterior Field Calculation, click to expand the Advanced Settings section.
|
|
8
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
|
1
|
|
2
|
|
3
|
|
1
|
|
2
|
|
3
|
Click the Custom button.
|
|
4
|
Locate the Element Size Parameters section. In the Maximum element size text field, type 343/3000/4.
|
|
1
|
|
2
|
In the Settings window for Boundary Layer Properties, locate the Geometric Entity Selection section.
|
|
3
|
|
4
|
|
5
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
|
1
|
|
2
|
|
3
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
|
6
|
Locate the Physics and Variables Selection section. In the table, clear the Solve for check box for Pressure Acoustics, Frequency Domain (acpr).
|
|
1
|
In the Model Builder window, right-click Study: Acoustics (Frequency Domain) and choose Study Steps>Frequency Domain>Frequency Domain.
|
|
2
|
|
3
|
|
4
|
Locate the Physics and Variables Selection section. In the table, clear the Solve for check box for Multibody Dynamics (mbd).
|
|
5
|
Click to expand the Values of Dependent Variables section. Find the Values of variables not solved for subsection. From the Settings list, choose User controlled.
|
|
6
|
|
7
|
|
8
|
|
1
|
|
2
|
|
3
|
In the Model Builder window, expand the Study: Acoustics (Frequency Domain)>Solver Configurations>Solution 2 (sol2)>Dependent Variables 2 node, then click Pressure (comp2.p).
|
|
4
|
|
5
|
|
6
|
|
7
|
|
8
|
|
9
|
|
10
|
|
1
|
In the Model Builder window, right-click Study: Acoustics (Frequency Domain)/Solution 2 (6) (sol2) and choose Selection.
|
|
2
|
|
3
|
|
4
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
|
1
|
|
2
|
|
3
|
|
4
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
|
6
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
|
6
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
|
1
|
|
2
|
|
3
|
Locate the Data section. From the Dataset list, choose Study: Acoustics (Frequency Domain)/Solution 2 (5) (sol2).
|
|
4
|
|
5
|
|
6
|
|
7
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
|
6
|
|
1
|
|
2
|
|
3
|
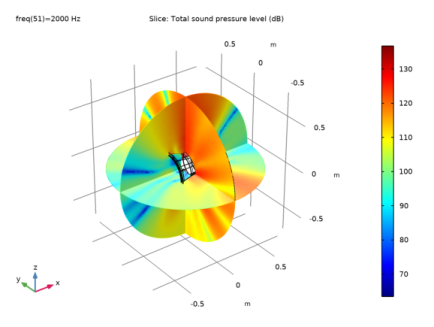
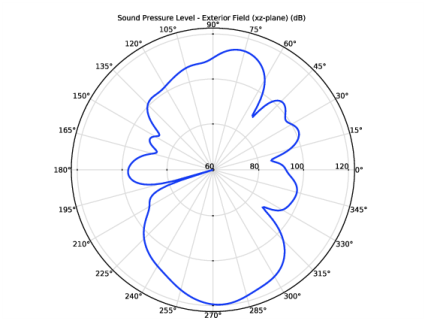
Locate the Title section. In the Title text area, type Sound Pressure Level - Exterior Field (xz-plane) (dB).
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
|
6
|
|
1
|
|
2
|
|
3
|
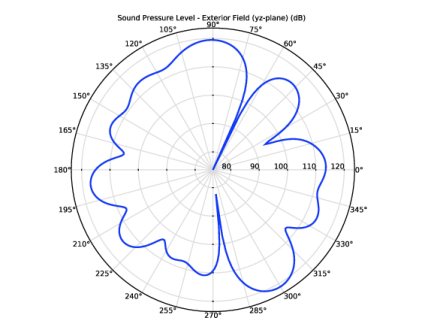
Locate the Title section. In the Title text area, type Sound Pressure Level - Exterior Field (yz-plane) (dB).
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
|
6
|
|
1
|
|
2
|
|
3
|
|
4
|
Browse to the model’s Application Libraries folder and double-click the file gearbox_vibration_noise_results_param.txt.
|
|
1
|
|
2
|
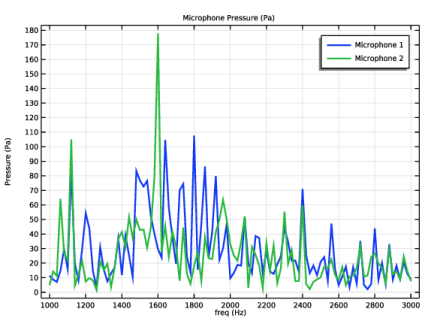
In the Settings window for Global Evaluation, type Global Evaluation: Microphone 1 in the Label text field.
|
|
3
|
Locate the Data section. From the Dataset list, choose Study: Acoustics (Frequency Domain)/Solution 2 (5) (sol2).
|
|
4
|
Locate the Expressions section. In the table, enter the following settings:
|
|
5
|
Click
|
|
1
|
|
2
|
In the Settings window for Global Evaluation, type Global Evaluation: Microphone 2 in the Label text field.
|
|
3
|
Locate the Expressions section. In the table, enter the following settings:
|
|
4
|
|
1
|
|
2
|
|
3
|
Locate the Data section. From the Dataset list, choose Study: Acoustics (Frequency Domain)/Solution 2 (5) (sol2).
|
|
4
|
|
5
|
|
6
|
|
7
|
In the associated text field, type Pressure (Pa).
|
|
1
|
|
2
|
|
4
|
|
5
|
|
6
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
|
1
|
|
2
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
Locate the Physics and Variables Selection section. In the table, clear the Solve for check box for Multibody Dynamics (mbd).
|
|
6
|
|
1
|
|
2
|
|
3
|
Locate the Data section. From the Dataset list, choose Study: Acoustics (Time Domain)/Solution 3 (8) (sol3).
|
|
1
|
|
2
|
|
3
|
|
4
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
|
6
|
|
1
|
|
2
|
|
3
|
|
4
|
|
1
|
|
2
|
|
3
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
|
1
|
|
2
|
|
3
|
|
1
|
|
2
|
|
3
|
|
1
|
|
2
|
|
3
|
|
1
|
|
2
|
|
3
|
Click OK.
|
|
1
|
|
2
|
Copy the following code into the Microphone2 window:
|
|
1
|
|
2
|
|
3
|
Click OK.
|
|
1
|
|
2
|
Copy the following code into the Microphone2 window:
|
|
1
|
|
2
|
|
1
|
|
2
|
|
3
|
|
1
|
|
2
|
|
1
|
|
2
|
|
3
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
|
6
|
|
1
|
|
2
|
|
3
|
|
4
|