where x is the state variable vector.
If the components of the mass matrix MC are small, it is possible to approximate the dynamic state-space model with a static model, where
 :
:
Let Null be the PDE constraint null-space matrix and
ud a particular solution fulfilling the constraints. The solution vector
U for the PDE problem can then be written
where u0 is the linearization point, which is the solution stored in the sequence once the state-space export feature is run.
The function mphstate requires that the input variables, output variables, and the list of the matrices to extract in the MATLAB workspace are all defined:
where <soltag> is the solver node tag used to assemble the system matrices listed in the cell array
out, and
<input> and
<output> are cell arrays containing the list of the input and output variables, respectively.
The output data str returned by
mphstate is a MATLAB structure and the fields correspond to the assembled system matrices.
mphstate uses linearization points to assemble the state-space matrices. The default linearization point is the current solution provided by the solver node, to which the state-space feature node is associated. If there is no solver associated to the solver configuration, a null solution vector is used as a linearization point.
where method corresponds to the type of linearization point — the initial value expression ('init') or a solution ('sol').
where <initsoltag> is the solver tag to use for a linearization point. You can also set the
initsol property to 'zero', which corresponds to using a null solution vector as a linearization point. The default is the current solver node where the assemble node is associated.
where <solnum> is an integer value corresponding to the solution number. The default value is the last solution number available with the current solver configuration.
State space models can be defined using the ss or
sparss function. The
sparss function can be used if the state space matrices are sparse. The system can be simulated using the
lsim function. In order to create a reduced order system using MATLAB we will use the
balred function. This function only accepts the use of full matrices. Hence, the function
ss is used for defining the state space system in MATLAB. Note that calling the function
ss with argument matrices that are sparse result in a set of warnings. These warnings can be ignored.
where <input> is the input vector of the state space system,
<tspan> the time step list.
where <order> is the desired order reduction, and
<tfinal> the simulation end time.
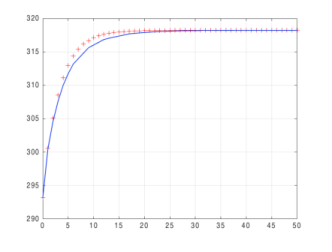
This is the same problem solved as in Extracting Reduced Order State-Space Matrices so you can compare the solution, and computational performance when solving the problem with reduced order model state space system matrices.
Extract the state-space system matrices Mc,
MA,
MB,
C, and
D, of the model with
power,
Temp, and
Text as input and the probe evaluation
comp1.ppb1 as output:
For some types of control system design the use of the matrices A,
B,
C, and
D are commonly used. Note that you need to keep the size of the matrices lower as you are not using a mass matrix. Hence, you need to change the size of mesh in order to reduce the number of degrees of freedom of the assembled system:
Extract the state-space system matrices A,
B,
C, and
D, of the model with
power,
Temp, and
Text as input and the probe evaluation
comp1.ppb1 as output: