str = mphstate(model,soltag,'out',{'SP'}) returns a MATLAB
® structure
str containing the state-space matrix
SP assembled using the solver node
soltag and accessible as
str.SP,
SP being taken from the
Out property list.
str = mphstate(model,soltag,'out',{'SP1','SP2',...}) returns a MATLAB structure
str containing the state-space matrices
SP1,
SP2, ... assembled using the solver node
soltag and accessible as
str.SP1and
str.SP2.
SP1 and
SP2 being taken from the out property list.
The function mphstate accepts the following property/value pairs:
The property Sparse controls whether the matrices
A,
B,
C,
D,
M,
MA,
MB, and
Null are stored in the sparse format.
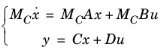
where x are the state variables,
u are the input variables, and
y are the output variables.
The full solution vector U can be then obtained from
where Null is the null-space matrix,
ud the constraint contribution, and
u0 is the linearization point, which is the solution stored in the sequence once the state-space export feature is run.
The matrices MC and
MCA are produced by the same algorithms that do the finite-element assembly and constraint elimination in COMSOL Multiphysics.
MC and
MCA are the same as the matrices
DC (eliminated mass matrix) and
−KC (
KC is the eliminated stiffness matrix). The matrices are produced from an exact residual vector Jacobian calculation (that is, differentiation of the residual vector with respect to the degrees of freedoms
x) plus an algebraic elimination of the constraints. The matrix
C is produced in a similar way (that is, the exact output vector Jacobian matrix plus constraint elimination).
The matrices MCB and
D are produced by a numerical differentiation of the residual and output vectors, respectively, with respect to the input parameters (the algorithm systematically perturbs the input parameters by multiplying them by a factor 1+10
−8).
Extract the state-space system matrices of the model with power,
Temp, and
Text as input and the probe evaluation
comp1.ppb1 as output: