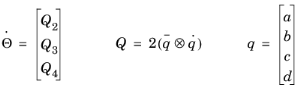
In 3D the situation is more complex. Six degrees of freedom are necessary. They are usually selected as three translations and three parameters for the rotation. For finite rotations any choice of three rotation parameters is however singular at some specific set of angles. For this reason, a four-parameter quaternion representation is used for the rotations in COMSOL Multiphysics. Thus, each rigid domain in 3D actually has seven degrees of freedom: three for the translation, and four for the rotation. The quaternion parameters are called
a,
b,
c, and
d. These four parameters are not independent, so an extra equation stating that
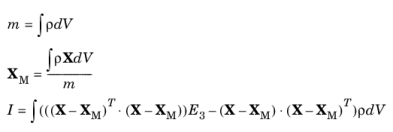
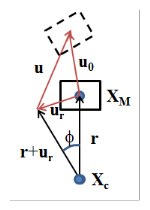
where X are the material coordinates of any point in the rigid domain,
XM is the center of mass of the rigid domain,
u is the translation vector at the center of mass, and
I is the identity matrix.
The rigid body displacement at the center of mass (u) are degrees of freedom. Thus the rigid body translational velocity and acceleration can be evaluated by directly taking the time derivatives of
u. In the time domain it can be expressed as:
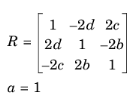
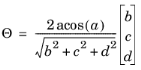
The parameter a can be considered as measuring the rotation, while
b,
c, and
d can be interpreted as the orientation of the rotation vector. For small rotations, this relation simplifies to:
Here  is the conjugate of q
is the conjugate of q, and

denotes quaternion multiplication.
The inertial properties mass (m) and moment of inertia tensor (
I)
of a rigid domain are computed as:
where E3 and
XM are the identity matrix and the center of mass of a rigid domain, respectively. The special case for the Shell interface is described in
Rigid Domain for Shells.
Here, the subscripts I and
ext denote inertial and external forces, respectively, and
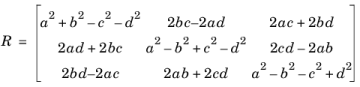
R is the current rotation matrix. The inertial forces are contributions from
Mass and Moment of Inertia nodes.
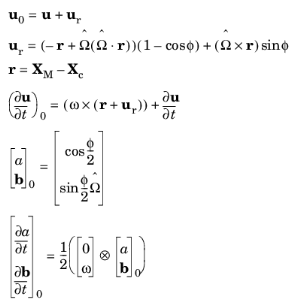
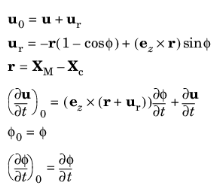
Given the initial values of translation (u), rotation (

), translational velocity (

) and angular velocity (
ω) about a center of rotation (
Xc), the rigid body displacement and quaternion degrees of freedom are initialized as:
The variable ur is the translation at the center of mass due to a rotation around the center of rotation, and is thus zero when the two points coincide. In the case that you are entering the data using a separate center of rotation, you must pay special attention to how the initial displacement and velocity are composed if initial rotations and rotational velocities are present.
where Xmc is the vector from the center of mass of the rigid domain (
XM) to the center of mass of this contribution (
Xm),
The components of this displacement vector are prescribed individually in the selected coordinate system. Through Equation 3-75, a constraint on a translation will impose a relation between translational and rotational degrees of freedom if the center of rotation differs from the center of mass.
The loads available for a flexible domain can also be used for a rigid domain. In addition to these boundary conditions, a rigid domain also has global subnodes for applying forces and moments. If you use Applied Force, a force and its location can be prescribed in a selected coordinate system. A force implicitly also contributes to the moment unless it is applied at the center of mass of a rigid domain. If an
Applied Moment node is used, a moment can be prescribed in a selected coordinate system.
where X is a coordinate on the boundary. If rotational degrees of freedom are present, which is the case in the Shell and Beam interfaces, the rotations are set equal to those of the rigid domain.