|
•
|
solid.sxy — Cauchy stress with respect to the global spatial coordinate system
|
|
•
|
solid.sl12 — Cauchy stress with respect to the local coordinate system of the material.
|
|
•
|
solid.SXY — Second Piola-Kirchhoff stress with respect to the global material coordinate system
|
|
•
|
solid.Sl12 — Second Piola-Kirchhoff stress with respect to the local coordinate system of the material
|
|
•
|
solid.eXY — Strain with respect to the global material coordinate system
|
|
•
|
solid.el12 — the local coordinate system of the material
|
|
•
|
|
|
Updating a Solution in the COMSOL Multiphysics Reference Manual.
|
|
2
|
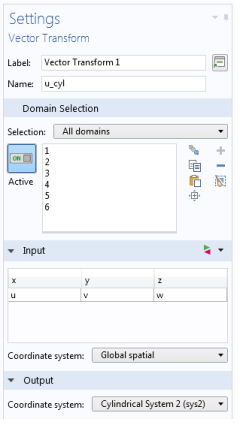
In the Input section, enter the components of the vector or tensor to be transformed. In most cases, you can pick it using Replace Expression (
|
|
|
Some tensors within the structural mechanics interfaces do not contain an intrinsic information about the associated coordinate system. This is in particular true for those tensors labeled as ‘local’. When using them in the Matrix Transform node, you must then manually select the coordinate system for the input tensor.
|
|
3
|
In the Vector Transform or Matrix Transform node, select the local coordinate system in the Output section. In the latter node, select it twice.
|
|
5
|
|
|