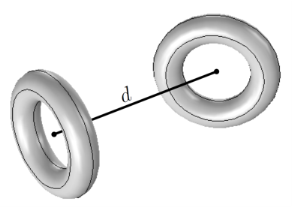
The Distance Joint maintains a specified distance between two points that are connected to a pair of attachments or rigid domains. As a default, the initial distance is maintained, so that the joint can be considered as a rigid link with ball joints at both ends. It is also possible to vary the distance so that the joint acts as a telescopic link.
Here Xsrc and
Xdst are the undeformed locations of the two connection points, and
usrc and
udst are the corresponding displacements. It is possible to vary the distance between the points through the extension value
Δ.