The Reduced Slot Joint has one rotational and one translational degree of freedom between the two attached components. Both components of the system are free to rotate about the joint rotational axis and free to translate along the joint translation axis. The reduced slot joint can be thought of as a combination of the prismatic joint and the hinge joint, with different axes for the allowed degrees of freedom. The translational axes and the rotational axis are orthogonal to each other.
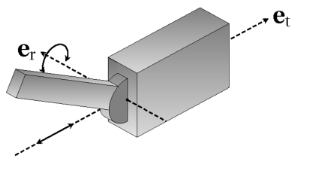
In addition to the translational axis, information about the joint rotational axis is also required. You specify its components in the selected coordinate system. In this joint, the initial joint axis (e10) and initial second axis (
e20) are the same as the initial joint translational axis (
etr0) and initial joint rotational axis (
erot0), respectively. If these axes are not orthogonal on input, then the rotational axis is adjusted in the plane spanned by
etr0 and
erot0 so as to fulfill that criterion.