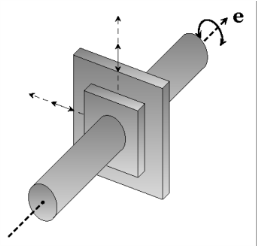
The Planar Joint has two translational and one rotational degrees of freedom between the two components. Both components are free to translate relative to each other in a plane perpendicular to the axis of joint, and they are also free to rotate about this axis.