The Screw Joint is similar to the cylindrical joint except that the relative displacement and the relative rotation, instead of being independent, are linearly related to each other. Hence, this joint effectively has only one degree of freedom.
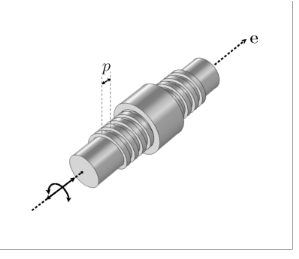
Here n and
p are the number of starts and the pitch of the screw thread, respectively.