Use a Rotated System (

) to define an orthonormal coordinate system which is rotated with respect to the reference system. In 2D, you can specify either an in-plane rotation angle or a full 3D rotation using Euler angles. In 3D, Euler angles (Z-X-Z) is the only option.
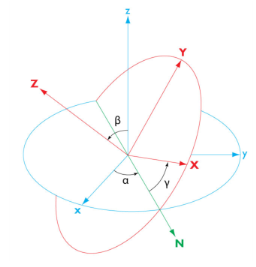
Full 3D rotations are specified as three consecutive Euler angles α,
β, and
γ, using a
Z-X-Z convention. Rotation axes and angles are illustrated in
Figure 5-4 where the resulting rotated system axes are denoted
X,
Y, and
Z.
The transformation matrix defined by the Euler angles transforms components of a fixed vector v from the rotated coordinate system,
[vX,vY,vZ], to components in the global system,
[vx,vy,vz], as follows:
If this coordinate system is added as a subnode to a Combined System node, define where it will be active using a selection in the
Geometric Entity Selection section. Also, the
Name and
Coordinate names fields are not available in this case.
In the Coordinate names table, the default names are entered —
x1,
x2, and
x3. In planar 2D models,
x1 and
x2 are typically the in-plane coordinates, and
x3 is the out-of-plane coordinate.
When the input method is set to In-plane rotation in a 2D component, you specify the rotation as a single angle (in radians) representing the
Rotation about out-of-plane axis. The
Out-of-plane axis can be set to any of the three main axes, pointing either into or out of the screen. The default for planar 2D geometries is
Third out-of screen, which leaves the
x and
y axes as in-plane reference axes. For axisymmetric geometries, the default is
Second out-of screen, leaving the
r and
z axes in-plane.
For 3D geometries and when General rotation has been chosen as input method in 2D, enter the
Euler angles (Z-X-Z) (in radians) in the
α,
β, and
γ fields (see the graphics in the
Settings window for definitions of these angles). The default values are 0 for all angles.
From the Work plane list, select
xy-plane (the default, for a standard global Cartesian coordinate system) or select any work plane in the geometry sequence. If you choose a work plane, the work plane’s coordinates
xw,
yw, and
zw are used for the definition of the rotated system.
