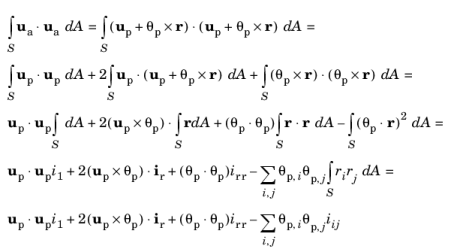
If an arbitrary reference point ‘p’ has a certain translation up and rotation
θp, then the average displacement of any other point can, under the assumption of rigid body motion, be written as
The rigid body motion parameters up and
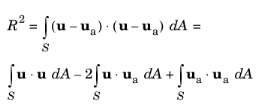
θp can be determined using a least squares fit. The quadratic error is
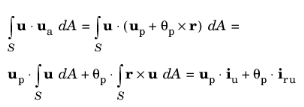
It is possible to solve the least squares problem analytically by minimizing R2. In that process, the first of the three integrals above is unimportant, since it does not involve the unknowns. The second integral can be simplified to
In a geometrically nonlinear setting, the cross product must be replaced by a general rotation matrix, R. The rotation matrix is now a nonlinear function of the rotation vector,
θp. However, another parameterization of the rotation using a quaternion representation is chosen in this case. For more information about the quaternion representation, see the theory for
Rigid Connector. The average displacement field can now be written as
This constitutes a set of nonlinear equations for determining the average rigid body motion in terms of up and
qp. The Jacobian of this system will, in general, cause a full coupling to the displacement field
u and it is also nonsymmetric. Since the structural mechanics problem in itself often has a symmetric stiffness matrix, adding a few unsymmetric contributions to the problem can affect the solution time and memory consumption significantly.
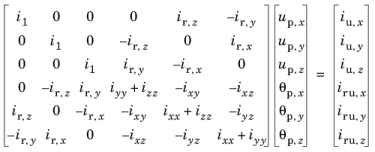
If, however, the displacement field is considered as known, then a small, symmetric system of equations for up and
qp can be solved separately. From an implementation point of view, the
nojac() operator is then applied to
u in the weak formulation. This approach is a much more efficient, but requires a special solver strategy where the displacement field is solved first.