For the Shell interface, the displacement is taken on the plate side defined by a connected location. This side can be determined automatically or specified by the user. In either case, the key assumption is that there is no offset in the direction of the shell normal between the measurement points. In other words:
The stiffness in the normal direction, kn, is a given by the axial stiffness of a bar
Here, Ef is the fastener Young’s modulus and
df is the fastener diameter. The total length is the sum of the thickness of the plate on the destination side,
tdst, and the thickness on the source side,
tsrc.
In the Solid Mechanics interface, the Fastener node can be used to model a pretensioned bolt connection. To account for this, the effective length of the fastener includes an estimated bolt head thickness. The normal stiffness then becomes
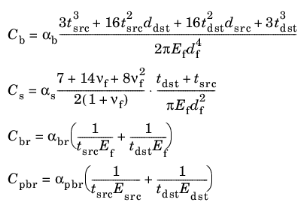
The stiffness in the transverse direction, ks, is more complicated. There are several contributions to the deformation of the rivet-plate system. Four compliance terms connected in series are considered,
Here, Cb is the fastener bending flexibility,
Cs is the fastener shear flexibility,
Cbr is the fastener bearing flexibility, and
Cpbr is the plate bearing flexibility.
Here, ΔFn is the change in load carried by the bolt, and
ΔFg is the change in the load carried by the plates. The joint constant,
Cj, is defined as
In the following, un is the displacement in the normal direction between the plates, measured positive when the fastener is extended, so that the increment in the fastener force is
Now, assume a preload, Fpre. After pretensioning the bolt, there is no resulting external force. The preload in the fastener is balanced by the stress in the surrounding plates. That is
The connection will be compressed a distance un0, which is negative. The force in the joint members is compressive,
which provides a value for Δun0. It is now possible to write the expression for the total fastener force under an arbitrary extension as
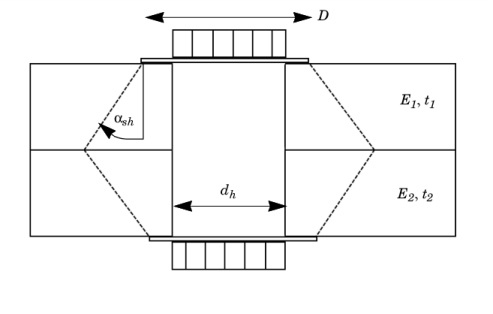
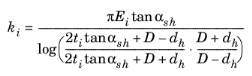
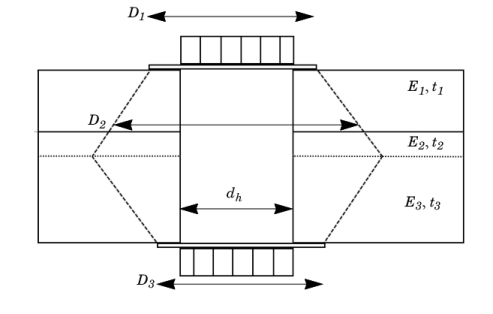
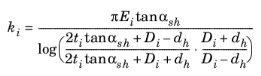
The grip stiffness is approximated by giving a value for the frustum angle αsh, which can also depend on the material, the thickness of the plates, and the applied external load.
Using the normal to the shell on the destination side, n, the displacement difference can be separated into normal and tangential parts: