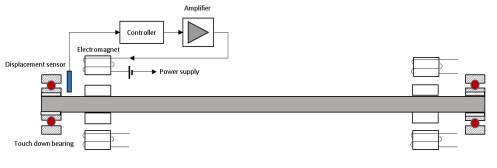
where us is the displacement measured from the sensor and
Kp,
Ki, and
Kd are the proportional, integral, and derivative gain of the controller, respectively.
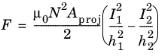
where B is the magnetic flux density,
Aproj is the projected pole area, and
μ0 is the permeability of free space. Assuming that the magnetic resistance of air is much larger than that of the poles, we can use Ampère’s law to write the magnetic flux density in the air gap as
where N is the number of turns per pole,
h is the air gap, and
I is the current of the coil. Using this, the air gap force can be written as
where I1 and
h1 are the coil current and air gap in one electromagnetic, and
I2 and
h2 are the coil current and air gap in the opposing electromagnet. Now if
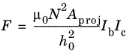
I1 and
I2 are composed of a steady bias current
Ib and a control current
Ic, we get
for h1 =
h2 =
h0. This expression is now linear with respect
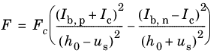
Ic. In general, the air gap on both sides will not be equal. As the rotor moves by the distance
us, the gaps change so that
h1 =
h0 − us and
h2 =
h0 + us. As a result, the expression for the air gap force, in general, is
In the above expression, a different bias current is assumed in the two opposite electromagnets. The force constant in the expression is also generalized to Fc. In general, the air gap force is a nonlinear function of current and displacement, which is suitable for a time-dependent analysis. For frequency-domain and eigenfrequency analyses, a linearized expression for the air gap force is more suitable. If we assume that
us<<
h0 and
Ic <<
Ib, then the above expression can be approximated as
where F0 is the static force produced due to the difference in bias current on positive and negative axes. It is given by
and the bearing stiffness ku due to displacement is given by
The coefficient in front of us can be considered as the effective impedance of the electromagnetic bearing.