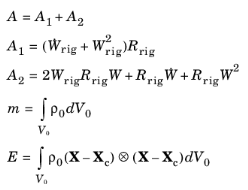
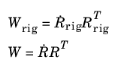
In the above, Rrig is the rotation matrix due to a rigid body motion and
R is the rotation matrix corresponding to corotational motion. Similarly,
Wrig and
W are the angular velocity tensors corresponding to rigid body motion and corotational motion, respectively. These are given by: