Here, fV is a body force per unit deformed volume, and
ρ is the current mass density. For the material frame formulation used in COMSOL Multiphysics, it is more appropriate to use a Lagrangian version of the equation:
Here, the first Piola–Kirchhoff tensor, P, is used. The term
FV is the body force with the components in the current configuration but given with respect to the undeformed volume, and
ρ0 is initial mass density. Also note that the gradient operators are not the same. In the first case, the gradient is taken with respect to spatial coordinates, and in the second case it is taken with respect to material coordinates.
Considering that Equation 3-13 is valid in an inertial frame, the fixed-to-corotating frame transformation and
Equation 3-4 are used to write
Equation 3-13 in the corotating frame as:
All the variables in Equation 3-14 are interpreted in the corotating frame. Here,
Sr is the second Piola–Kirchhoff stress tensor, and
Fr is the deformation gradient tensor. The COMSOL Multiphysics implementation of the equations in the Solid Rotor interface is, however, not based on the equation of motion directly but rather on the
principle of virtual work.
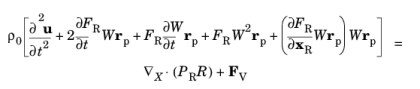
The momentum balance equation (Equation 3-13) can be transformed by incorporating the quantities obtained by using rotated coordinates as a reference (see
Equation 3-8 and
Equation 3-12). The momentum balance then becomes
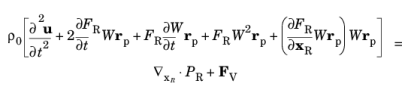
Using Equation 3-6 to transfer the derivative with respect to the material coordinate
X to the derivative with respect to the rotating coordinate
xR, the momentum balance equation changes to
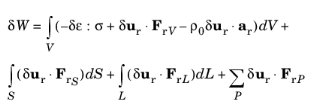
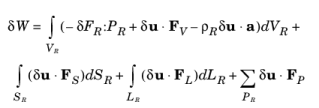
For the transient case, virtual work can be obtained by multiplying the momentum balance equation by δu and integrating the resulting expression over the material volume. Since many of the quantities are expressed in terms of rotated coordinates
xR rather than the material coordinate
X, we can change the integral over the material volume
V to an integral over the rotating volume
VR. The resulting expression is