Let X be the material position of a particle on the rotor and
ur be the displacement of that point due to the deformation in the corotating frame. In the following, the subscript ‘r’ is used to denote quantities observed in the corotating frame. Let
Xbp be the base point on the axis of the rotor in the space-fixed frame, which defines the origin of the corotating frame. Then, the position of the material point
X in the corotating frame with respect to the origin is given by
The position vector of the particle at point X after the deformation
χ can be expressed in the space-fixed frame as
Here, rp is the rotation position and
R is the rotation matrix that maps the components in the rotated directions to those in the fixed directions. These are defined as
where θ is the rotation around the axis
e3,
I is the identity matrix,
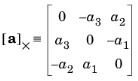
[e3]× is the
cross product matrix of
e3, and
⊗ denotes the outer product. The cross product matrix is defined as
when a and
b are two arbitrary vectors. The total displacement, including the effect of rotation, represented in a fixed reference frame of a rotor point then reads
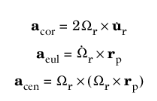
where ar is the effective acceleration which accounts for the effect of the rotor’s rotation observed in the corotating reference frame. The expression for the effective acceleration can be written in terms of equivalent cross products as
where aeul,
acen, and
acor are the frame accelerations corresponding to
Euler,
Centrifugal, and
Coriolis acceleration, respectively. These are given by
where Ωr is the angular velocity vector, which is defined as
 ,
,