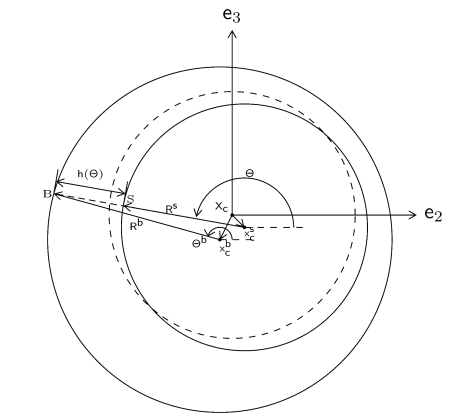
Initially, both structure and bearing are concentric to each other with the common center located at Xc. During operation they move relative to each other. Let the centers of the structure and bearing now be located at
xcs and
xcb, respectively. The film thickness is obtained by calculating the height of the bearing surfaces from the structure surface. To evaluate the film thickness, consider a radial line from the current center of the structure
xcs at an angle
Θ from the local
y-axis. This line intersects the bearing and the structural surfaces at points B and S, respectively. The radial line from the new center of the bearing
xcb to B makes an angle
Θb from the local
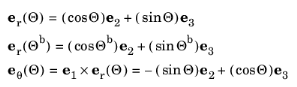
y-axis. Let the normalized radial vectors from structure and bearing surfaces be
er(
Θ) and
er(
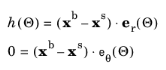
Θb), respectively. The position vector of the point B is given by
Here xb and
xs are the position vectors of the points B and S, respectively.
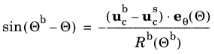
Rb(
Θb) and
Rs(
Θ) are the radial positions of the bearing and structure surfaces from their respective centers. Since the points B and S are located along the radial vector
er(
Θ):
Here, e1 is the bearing axis direction, and
e2 and
e3 are the two transverse directions.
This can be generalized to include the change in Rb in the axial direction too in the following way: