|
•
|
|
•
|
|
•
|
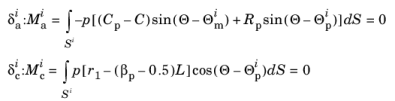
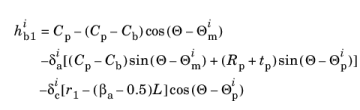
r1 = Axial coordinate of the bearing from center
|
|
•
|
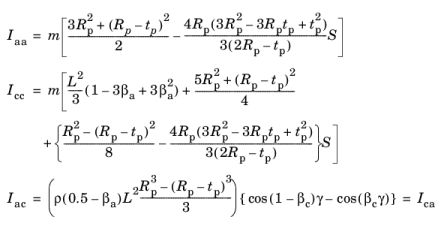
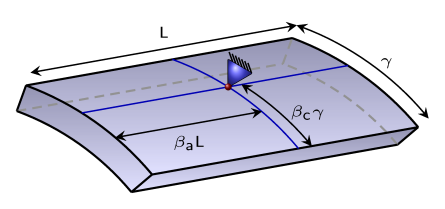
βa = Axial offset factor of the pivot point from one end of the pad
|
|
•
|
βc = Circumferential offset factor of the pivot point from the leading edge the pad
|
|
•
|
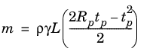
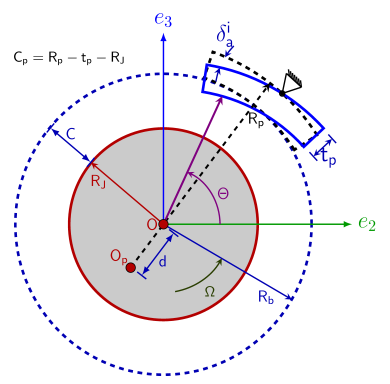
Rp = Pad outer radius
|
|
•
|
tp = Pad thickness
|
|
•
|
L = Bearing length
|
|
•
|
γ = Pad sector angle
|
|
•
|
Rb = Bearing radius
|
|
•
|
RJ = Journal radius
|