with respect to the control variables ξ evaluated at the final time
t=T. The dependent variables,
u(ξ), depend on the controls,
ξ, but for notational simplicity we will just write
u in the following. Note that the objective cannot depend on time derivatives of the dependent variables, that is
where Λ are the constraint Lagrange multipliers, or (generalized) reaction forces, corresponding to the constraints
M. It is assumed that
Q does not explicitly depend on
Λ.
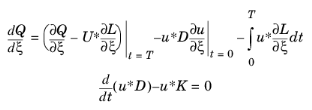
To compute the sensitivity of Q with respect to
ξ, first apply the chain rule:
In this expression, the sensitivity of the solution with respect to the control variables, ∂u/∂ξ, is still an unknown quantity. Therefore, differentiate the forward problem,
Equation 2-15, formally with respect to
ξ:
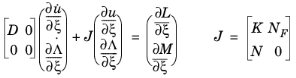
Here, D =
−∂L/∂ K
K =
−∂L/∂u,
and
N =
−∂M/∂u as usual. Assuming that the constraint force Jacobian
NF is independent of
ξ (that is,
∂NF/∂ξ = 0), you can write the above relations in matrix form as
solve for the sensitivities ∂u/∂ξ and
∂Λ/∂ξ, with initial conditions
∂u0/∂ξ and
∂Λ0/∂ξ, respectively, and plug them back for evaluation at
t = T into
Equation 2-16.
If the number of individual control variables, ξj, is small,
Equation 2-17 can be solved for each right-hand side
[∂L/∂ξj ∂Μ/∂ξj]T with corresponding initial conditions and the solution inserted into
Equation 2-16. This is the
forward method, which in addition to the sensitivity
dQ/dξ returns the sensitivity of the solution,
∂u/∂ξ. As an alternative, the right-hand side of
Equation 2-17 can be calculated by finite differences using the
forward numeric method.