where λ is the eigenvalue and
u is the eigenmode, while
E,
D, and
K are the eliminated mass, damping, and stiffness matrices, respectively. These matrices are also sometimes referred to as
Ec,
Dc, and
Kc. Taking the derivative of
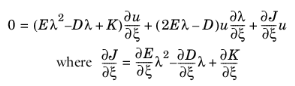
Equation 2-8 with respect to a set of controls,
ξ, yields
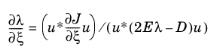
If the problem is symmetric, it is self-adjoint; that is, u∗ = u. Otherwise, the left eigenvectors have to be computed. In either case, the sensitivity of the eigenvalue can be computed as
In COMSOL Multiphysics this is referred to as the adjoint gradient method. The implementation assumes that the controls do not enter any (nonweak) constraints. Moreover, the eigenvalue problem can be a linearization of a nonlinear problem, and the implementation assumes that the linearization point is independent of the controls.