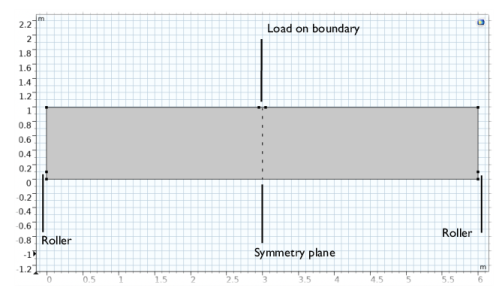
The objective functional for the optimization, which defines the criterion for optimality, is the total strain energy. Note that the strain energy exactly balances the work done by the applied load, so minimizing the strain energy minimizes the displacement induced at the points where load is applied, effectively minimizing the compliance of the structure — maximizing its stiffness. The other, conflicting, objective is minimization of total mass, which is implemented as an upper bound on the mass of the optimized structure.
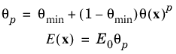
Since the stiffness must, for numerical reasons, not vanish completely anywhere in the model, the density parameter is constrained such that θmin ≤ ρ ≤ 1. The exponent
p ≥ 1 is a penalty factor that makes intermediate densities provide less stiffness compared to what they cost in weight.
When there is an overall limit on the fraction Vfrac = 0.5 of the domain area,
A, occupied by solid material
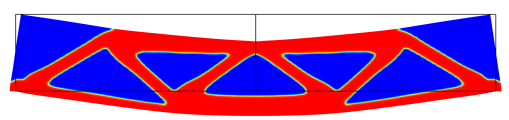
the SIMP penalization forces θc toward either of its bounds. Increasing
p therefore leads to a sharper solution.
High values of β are associated with strong projection and less gray scale, but also slows down the optimization process, so initially we will not use it and thus set
θ =
θf.