|
|
|
|
|
|
•
|
Model the impact by an initial velocity. The free fall velocity from height a h is
|
|
1
|
|
2
|
In the Select Physics tree, select Structural Mechanics > Explicit Dynamics > Solid Mechanics, Explicit Dynamics (solid).
|
|
3
|
Click Add.
|
|
4
|
Click
|
|
5
|
In the Select Study tree, select Preset Studies for Selected Physics Interfaces > Explicit Dynamics.
|
|
6
|
Click
|
|
1
|
|
2
|
|
3
|
|
4
|
Click
|
|
6
|
Click
|
|
7
|
|
8
|
|
9
|
Clear the Automatic detection of small details checkbox.
|
|
1
|
|
2
|
On the object imp1, select Domain 1 only.
|
|
3
|
|
4
|
|
5
|
On the object imp1, select Boundaries 9 and 39 only.
|
|
6
|
Click
|
|
1
|
|
2
|
|
3
|
Click the Custom button.
|
|
4
|
|
5
|
|
6
|
|
7
|
|
8
|
Click
|
|
1
|
|
2
|
Go to the Add Material window.
|
|
3
|
|
4
|
Click the Add to Component button in the window toolbar.
|
|
5
|
|
1
|
|
2
|
Go to the Result Templates window.
|
|
3
|
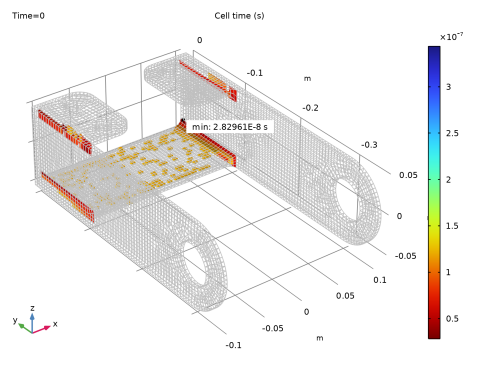
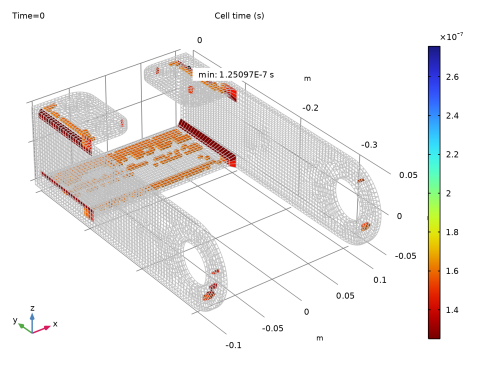
In the tree, select Study 1/Solution 1 (sol1) > Solid Mechanics, Explicit Dynamics > Cell Time (solid).
|
|
4
|
Click the Add Result Template button in the window toolbar.
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
On the object pard1, select Point 17 only.
|
|
1
|
|
2
|
On the object pard1, select Domains 1 and 5 only.
|
|
1
|
|
2
|
|
3
|
|
4
|
On the object pard2, select Point 18 only.
|
|
1
|
|
2
|
On the object pard2, select Domains 2 and 7 only.
|
|
1
|
|
2
|
|
3
|
|
4
|
On the object pard3, select Point 19 only.
|
|
1
|
|
2
|
On the object pard3, select Domains 2 and 8 only.
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
On the object pard4, select Point 31 only.
|
|
1
|
|
2
|
On the object pard4, select Domains 5 and 6 only.
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
On the object pard5, select Point 71 only.
|
|
1
|
|
2
|
On the object pard5, select Domains 7 and 9 only.
|
|
1
|
|
2
|
On the object pard6, select Edges 54 and 134 only.
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
On the object pare1, select Point 28 only.
|
|
1
|
|
2
|
On the object pare1, select Domains 5 and 6 only.
|
|
1
|
|
2
|
|
3
|
|
4
|
On the object pard7, select Point 84 only.
|
|
5
|
|
6
|
On the object pard7, select Point 84 only.
|
|
1
|
|
2
|
On the object pard7, select Domains 12 and 13 only.
|
|
1
|
|
2
|
On the object fin, select Domains 5–15 only.
|
|
3
|
|
1
|
|
2
|
Drag and drop below Size.
|
|
1
|
|
2
|
|
3
|
|
4
|
|
1
|
|
2
|
|
3
|
|
1
|
|
2
|
|
3
|
|
4
|
Click
|
|
1
|
|
1
|
|
2
|
Select the object pard8 only.
|
|
3
|
|
4
|
|
5
|
|
6
|
|
7
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
|
6
|
|
7
|
|
1
|
|
2
|
Select the object rot1 only.
|
|
3
|
|
4
|
|
5
|
|
6
|
On the object rot1, select Point 10 only.
|
|
7
|
|
8
|
|
9
|
Click
|
|
1
|
In the Model Builder window, under Component 1 (comp1) > Solid Mechanics, Explicit Dynamics (solid) click Initial Values 1.
|
|
2
|
|
3
|
In the Structural velocity field vector, enter
|
|
4
|
|
1
|
|
3
|
|
4
|
Click to select the
|
|
1
|
In the Model Builder window, under Component 1 (comp1) > Solid Mechanics, Explicit Dynamics (solid) click Contact 1.
|
|
2
|
|
3
|
|
4
|
|
5
|
|
1
|
|
2
|
|
3
|
|
4
|
Locate the Friction Force Penalty Factor section. From the Penalty factor control list, choose From parent.
|
|
1
|
|
1
|
|
2
|
|
3
|
|
4
|
|
1
|
|
3
|
Drag and drop below Swept 2.
|
|
1
|
|
2
|
|
3
|
|
4
|
|
1
|
|
3
|
|
4
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
|
6
|
|
1
|
|
2
|
|
3
|
Click
|
|
4
|
|
5
|
Click OK.
|
|
6
|
|
8
|
Click
|
|
9
|
|
10
|
Click OK.
|
|
11
|
|
13
|
Click
|
|
1
|
|
2
|
|
3
|
|
1
|
|
3
|
In the Settings window for Volume Integration, click Replace Expression in the upper-right corner of the Expressions section. From the menu, choose Component 1 (comp1) > Solid Mechanics, Explicit Dynamics > Material properties > solid.rhoa - Artificial density - kg/m³.
|
|
4
|
Locate the Expressions section. In the table, enter the following settings:
|
|
1
|
|
2
|
In the Settings window for Volume Integration, click Replace Expression in the upper-right corner of the Expressions section. From the menu, choose Component 1 (comp1) > Solid Mechanics, Explicit Dynamics > Material properties > solid.rho - Density - kg/m³.
|
|
3
|
Locate the Expressions section. In the table, enter the following settings:
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
|
6
|
Select the Keep child nodes checkbox.
|
|
7
|
|
1
|
In the Model Builder window, expand the Results > Stress (solid) > Volume 1 node, then click Deformation.
|
|
2
|
|
3
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
|
6
|
|
1
|
|
1
|
|
2
|
|
4
|
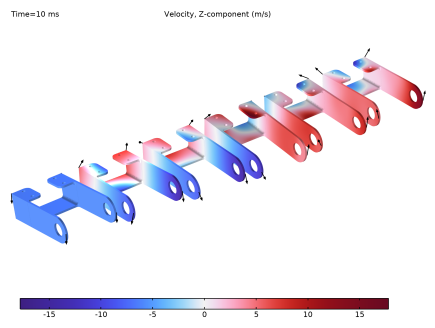
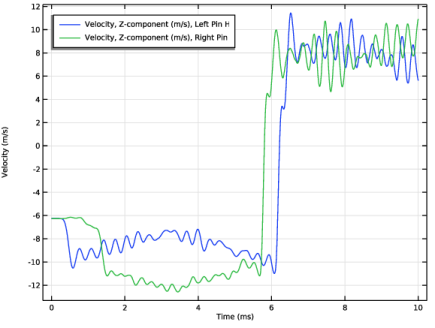
Click Replace Expression in the upper-right corner of the Expression section. From the menu, choose Component 1 (comp1) > Solid Mechanics, Explicit Dynamics > Acceleration and velocity > Velocity - m/s > solid.u_tZ - Velocity, Z-component.
|
|
1
|
|
2
|
|
1
|
|
2
|
|
3
|
|
4
|
|
1
|
|
2
|
|
3
|
|
4
|
|
1
|
|
2
|
|
3
|
|
5
|
|
1
|
|
2
|
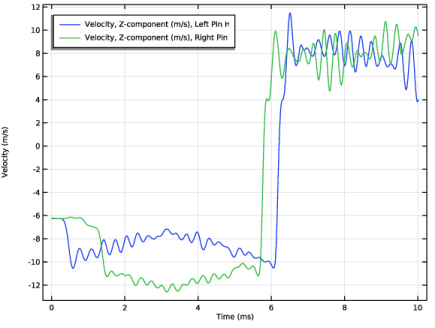
In the Settings window for Surface, click Replace Expression in the upper-right corner of the Expression section. From the menu, choose Component 1 (comp1) > Solid Mechanics, Explicit Dynamics > Acceleration and velocity > Velocity - m/s > solid.u_tZ - Velocity, Z-component.
|
|
3
|
|
4
|
|
1
|
|
2
|
|
3
|
|
1
|
|
2
|
|
3
|
|
4
|
|
1
|
|
2
|
In the Settings window for Arrow Point, click Replace Expression in the upper-right corner of the Expression section. From the menu, choose Component 1 (comp1) > Solid Mechanics, Explicit Dynamics > Acceleration and velocity > solid.u_tX,solid.u_tY,solid.u_tZ - Velocity.
|
|
3
|
|
4
|
|
5
|
|
6
|
|
7
|
|
8
|
|
1
|
|
2
|
|
3
|
|
4
|
|
1
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
|
1
|
|
2
|
|
3
|
Locate the Plot Settings section.
|
|
4
|
|
1
|
|
2
|
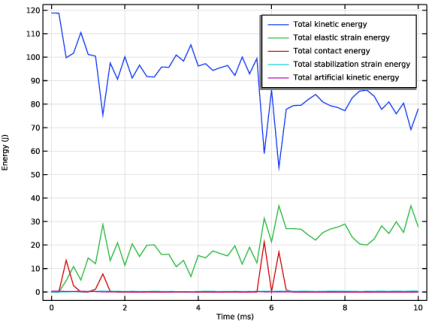
In the Settings window for Global, click Replace Expression in the upper-right corner of the y-Axis Data section. From the menu, choose Component 1 (comp1) > Solid Mechanics, Explicit Dynamics > Global > solid.Wk_tot - Total kinetic energy - J.
|
|
3
|
Click Add Expression in the upper-right corner of the y-Axis Data section. From the menu, choose Component 1 (comp1) > Solid Mechanics, Explicit Dynamics > Global > solid.Ws_tot - Total elastic strain energy - J.
|
|
4
|
Click Add Expression in the upper-right corner of the y-Axis Data section. From the menu, choose Component 1 (comp1) > Solid Mechanics, Explicit Dynamics > Global > solid.Wcnt_tot - Total contact energy - J.
|
|
5
|
Click Add Expression in the upper-right corner of the y-Axis Data section. From the menu, choose Component 1 (comp1) > Solid Mechanics, Explicit Dynamics > Global > solid.Wstb_tot - Total stabilization strain energy - J.
|
|
6
|
Click Add Expression in the upper-right corner of the y-Axis Data section. From the menu, choose Component 1 (comp1) > Solid Mechanics, Explicit Dynamics > Global > solid.Wka_tot - Total artificial kinetic energy - J.
|
|
7
|
|
1
|
|
2
|
|
4
|
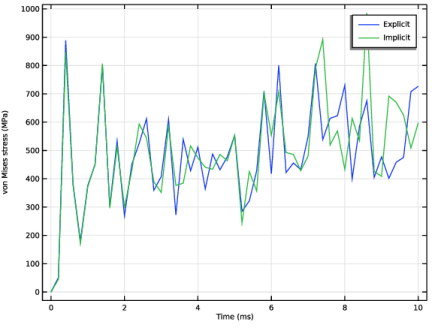
In the Settings window for Volume Maximum, click Replace Expression in the upper-right corner of the Expressions section. From the menu, choose Component 1 (comp1) > Solid Mechanics, Explicit Dynamics > Stress > solid.misesGp - von Mises stress - N/m².
|
|
5
|
|
1
|
Go to the Evaluation Group 2 window.
|
|
2
|
Click the Table Graph button in the window toolbar.
|
|
1
|
|
2
|
|
1
|
|
2
|
Go to the Add Study window.
|
|
3
|
|
4
|
Click the Add Study button in the window toolbar.
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
|
1
|
In the Model Builder window, under Component 1 (comp1) > Definitions, Ctrl-click to select Left Pin Hole (point1) and Right Pin Hole (point2).
|
|
2
|
Right-click and choose Duplicate.
|
|
1
|
|
2
|
Click
|
|
3
|
Click
|
|
1
|
|
2
|
|
3
|
|
4
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
|
6
|
|
1
|
|
2
|
|
3
|
Locate the Plot Settings section.
|
|
4
|
|
5
|
|
1
|
In the Model Builder window, under Results > Evaluation Group 2 right-click Volume Maximum 1 and choose Duplicate.
|
|
2
|
|
3
|
|
4
|
|
1
|
|
2
|
|
3
|
|
1
|
|
2
|
|
3
|
Select the Show legends checkbox.
|
|
4
|
|
6
|
|
1
|
|
2
|
|
1
|
|
2
|
Drag and drop below Stress, Implicit.
|
|
1
|
|
2
|
|
3
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
|
1
|
In the Model Builder window, under Component 1 (comp1) > Definitions, Ctrl-click to select Left Pin Hole (point1) and Right Pin Hole (point2).
|
|
2
|
Right-click and choose Group.
|
|
1
|
In the Model Builder window, under Component 1 (comp1) > Definitions, Ctrl-click to select Left Pin Hole 1 (point3) and Right Pin Hole 1 (point4).
|
|
2
|
Right-click and choose Group.
|