|
|
|
|
1
|
|
2
|
|
3
|
Click Add.
|
|
4
|
Click
|
|
5
|
|
6
|
Click
|
|
1
|
|
2
|
|
3
|
Click
|
|
4
|
Browse to the model’s Application Libraries folder and double-click the file roller_conveyor_dynamics_parameters.txt.
|
|
1
|
|
2
|
|
3
|
|
4
|
Click
|
|
5
|
Browse to the model’s Application Libraries folder and double-click the file roller_conveyor_dynamics.mphbin.
|
|
6
|
Click
|
|
7
|
Click to expand the Selections of Resulting Entities section. Select the Resulting objects selection checkbox.
|
|
8
|
Select the Individual object selections checkbox.
|
|
9
|
|
1
|
|
2
|
|
3
|
On the object imp1(14), select Domain 1 only.
|
|
4
|
Locate the Color section. From the Color list, choose None or — if you are running the cross-platform desktop —Custom. On the cross-platform desktop, click the Color button.
|
|
5
|
Click Define custom colors.
|
|
7
|
Click Add to custom colors.
|
|
8
|
|
9
|
Click
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
Click OK.
|
|
1
|
|
2
|
|
3
|
On the object imp1(1), select Domain 1 only.
|
|
4
|
On the object imp1(23), select Domain 1 only.
|
|
5
|
Locate the Color section. From the Color list, choose None or — if you are running the cross-platform desktop —Custom. On the cross-platform desktop, click the Color button.
|
|
6
|
Click Define custom colors.
|
|
8
|
Click Add to custom colors.
|
|
9
|
|
10
|
Click
|
|
1
|
|
2
|
|
3
|
On the object imp1(17), select Domain 1 only.
|
|
4
|
On the object imp1(2), select Domains 1 and 2 only.
|
|
5
|
On the object imp1(22), select Domain 1 only.
|
|
6
|
On the object imp1(25), select Domain 1 only.
|
|
7
|
On the object imp1(26), select Domain 1 only.
|
|
8
|
On the object imp1(29), select Domain 1 only.
|
|
9
|
On the object imp1(3), select Domain 1 only.
|
|
10
|
On the object imp1(33), select Domains 1 and 2 only.
|
|
11
|
Locate the Color section. From the Color list, choose None or — if you are running the cross-platform desktop —Custom. On the cross-platform desktop, click the Color button.
|
|
12
|
Click Define custom colors.
|
|
14
|
Click Add to custom colors.
|
|
15
|
|
16
|
Click
|
|
17
|
|
1
|
|
2
|
|
3
|
On the object imp1(42), select Domains 1 and 2 only.
|
|
4
|
Locate the Color section. From the Color list, choose None or — if you are running the cross-platform desktop —Custom. On the cross-platform desktop, click the Color button.
|
|
5
|
Click Define custom colors.
|
|
7
|
Click Add to custom colors.
|
|
8
|
|
9
|
Click
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
Click OK.
|
|
6
|
|
7
|
|
8
|
|
9
|
Click OK.
|
|
10
|
|
11
|
From the Color list, choose None or — if you are running the cross-platform desktop —Custom. On the cross-platform desktop, click the Color button.
|
|
12
|
Click Define custom colors.
|
|
14
|
Click Add to custom colors.
|
|
15
|
|
16
|
Click
|
|
1
|
In the Model Builder window, under Component 1 (comp1) > Geometry 1 right-click Ball Boundaries (adjsel1) and choose Duplicate.
|
|
2
|
|
3
|
|
4
|
Click
|
|
5
|
Click
|
|
6
|
|
7
|
Click OK.
|
|
8
|
|
9
|
|
10
|
Click
|
|
1
|
In the Model Builder window, under Component 1 (comp1) > Geometry 1 right-click Rollers (difsel1) and choose Duplicate.
|
|
2
|
|
3
|
|
4
|
|
5
|
|
6
|
Click OK.
|
|
7
|
|
8
|
|
9
|
In the Add dialog, in the Selections to subtract list, choose Ball Boundaries and Rollers Boundaries.
|
|
10
|
Click OK.
|
|
11
|
|
12
|
|
13
|
Click
|
|
1
|
In the Model Builder window, under Component 1 (comp1) > Geometry 1, Ctrl-click to select Ball (sel1), Ball Boundaries (adjsel1), Frames (sel2), Guides (sel3), Tray (sel4), Rollers (difsel1), Rollers Boundaries (adjsel2), and Fixed Boundaries (difsel2).
|
|
2
|
Right-click and choose Group.
|
|
1
|
|
2
|
|
3
|
|
4
|
Clear the Create pairs checkbox.
|
|
5
|
Click
|
|
1
|
|
2
|
Go to the Add Material window.
|
|
3
|
|
4
|
Click the Add to Component button in the window toolbar.
|
|
5
|
|
1
|
In the Settings window for Multibody Dynamics, click Physics Node Generation in the upper-right corner of the Automated Model Setup section. From the menu, choose Create Rigid Domains.
|
|
1
|
|
2
|
|
1
|
Similarly rename other Rigid Material nodes using the information given in the table below.
|
|
2
|
|
1
|
|
2
|
|
3
|
|
4
|
|
1
|
|
2
|
|
3
|
|
1
|
|
2
|
|
3
|
From the list, choose Select a parallel edge.
|
|
1
|
|
1
|
|
2
|
|
3
|
|
4
|
|
1
|
|
2
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
|
6
|
Select the Use finite length checkbox.
|
|
7
|
|
1
|
|
2
|
|
3
|
|
4
|
|
1
|
|
2
|
|
3
|
|
1
|
In the Model Builder window, under Component 1 (comp1) > Multibody Dynamics (mbd) right-click Rigid Body Contact 40 and choose Duplicate.
|
|
2
|
|
3
|
|
4
|
Locate the Boundary Selection, Destination section. Click to select the
|
|
1
|
|
2
|
|
3
|
Click
|
|
1
|
|
2
|
|
1
|
In the Model Builder window, under Component 1 (comp1) > Multibody Dynamics (mbd), Ctrl-click to select Rigid Body Contact 31, Rigid Body Contact 32, Rigid Body Contact 33, Rigid Body Contact 34, Rigid Body Contact 35, Rigid Body Contact 36, Rigid Body Contact 37, Rigid Body Contact 38, Rigid Body Contact 39, and Rigid Body Contact 40.
|
|
2
|
Right-click and choose Group.
|
|
1
|
In the Model Builder window, under Component 1 (comp1) > Multibody Dynamics (mbd), Ctrl-click to select Rigid Body Contact 41 and Rigid Body Contact 42.
|
|
2
|
Right-click and choose Group.
|
|
1
|
|
2
|
|
3
|
Click
|
|
4
|
In the Paste Selection dialog, type 13, 19, 23, 29, 39, 49, 59, 69, 79, 89, 99, 109, 119, 137, 147, 157, 162, 163, 173, 183, 193, 203, 219, 229, 234, 235, 240, 241, 251, 261, 266, 267, 277, 290, 297, 302, 312, 322, 332, 342, 352, 362, 372, 382 in the Selection text field.
|
|
5
|
Click OK.
|
|
1
|
|
2
|
|
3
|
|
1
|
|
2
|
|
3
|
|
1
|
|
1
|
|
3
|
|
4
|
|
1
|
|
2
|
|
3
|
|
4
|
|
1
|
|
2
|
|
3
|
|
4
|
|
1
|
|
2
|
|
3
|
|
4
|
|
1
|
|
2
|
|
3
|
|
4
|
|
1
|
|
2
|
|
3
|
|
4
|
|
1
|
|
2
|
|
3
|
|
5
|
|
6
|
Locate the Element Size Parameters section.
|
|
7
|
|
8
|
Click
|
|
1
|
|
2
|
|
3
|
|
4
|
|
1
|
|
2
|
|
3
|
In the Model Builder window, expand the Study 1 > Solver Configurations > Solution 1 (sol1) > Time-Dependent Solver 1 node, then click Fully Coupled 1.
|
|
4
|
|
5
|
|
6
|
In the Model Builder window, under Study 1 > Solver Configurations > Solution 1 (sol1) click Time-Dependent Solver 1.
|
|
7
|
|
8
|
|
9
|
|
1
|
|
2
|
|
3
|
|
4
|
|
1
|
|
2
|
|
3
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
|
1
|
|
2
|
|
3
|
|
1
|
|
2
|
|
3
|
|
4
|
|
1
|
|
2
|
|
3
|
|
1
|
|
2
|
|
3
|
|
4
|
|
1
|
|
2
|
|
1
|
|
2
|
|
3
|
Select the x-axis label checkbox.
|
|
4
|
Select the y-axis label checkbox.
|
|
5
|
|
1
|
|
2
|
|
3
|
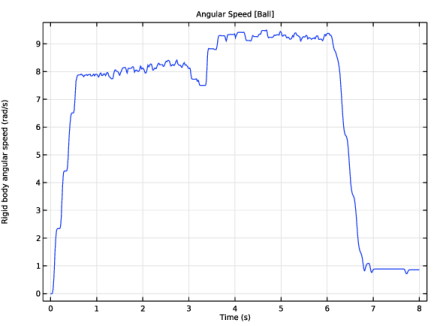
Locate the Plot Settings section. In the y-axis label text field, type Rigid body angular speed (rad/s).
|
|
1
|
|
2
|
|
1
|
|
2
|
|
1
|
|
2
|
|
3
|
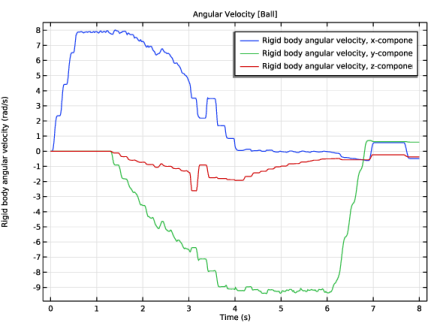
Locate the Plot Settings section. In the y-axis label text field, type Rigid body angular velocity (rad/s).
|
|
4
|
|
1
|
|
2
|
|
4
|
|
1
|
|
2
|
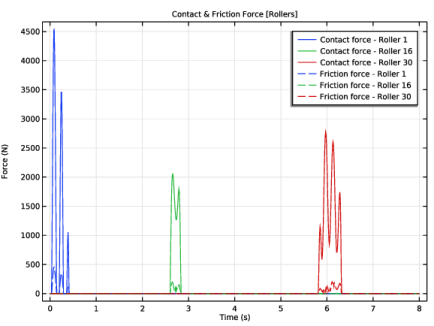
In the Settings window for 1D Plot Group, type Contact & Friction Force [Rollers] in the Label text field.
|
|
1
|
In the Model Builder window, expand the Contact & Friction Force [Rollers] node, then click Global 1.
|
|
2
|
|
3
|
Click
|
|
5
|
|
1
|
|
2
|
|
4
|
Click to expand the Coloring and Style section. Find the Line style subsection. From the Line list, choose Dashed.
|
|
5
|
|
6
|
Locate the Legends section. In the table, enter the following settings:
|
|
1
|
|
2
|
|
3
|
|
4
|
|
1
|
|
2
|
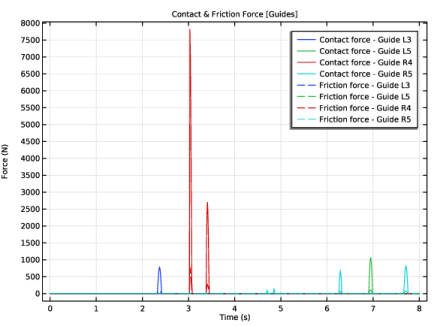
In the Settings window for 1D Plot Group, type Contact & Friction Force [Guides] in the Label text field.
|
|
1
|
In the Model Builder window, expand the Contact & Friction Force [Guides] node, then click Global 1.
|
|
2
|
|
3
|
Click
|
|
5
|
Locate the Legends section. In the table, enter the following settings:
|
|
1
|
|
2
|
|
4
|
Locate the Legends section. In the table, enter the following settings:
|
|
1
|
|
2
|
|
1
|
|
2
|
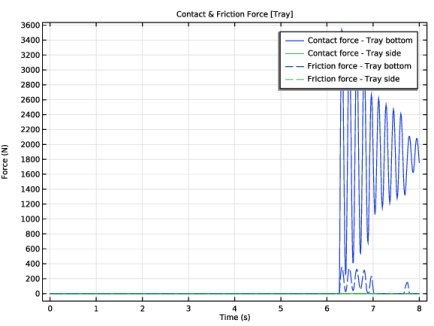
In the Settings window for 1D Plot Group, type Contact & Friction Force [Tray] in the Label text field.
|
|
1
|
|
2
|
|
3
|
Click
|
|
5
|
|
6
|
Right-click and choose Delete.
|
|
1
|
|
2
|
|
3
|
Click
|
|
5
|
|
6
|
Right-click and choose Delete.
|
|
1
|
|
2
|
|
1
|
|
2
|
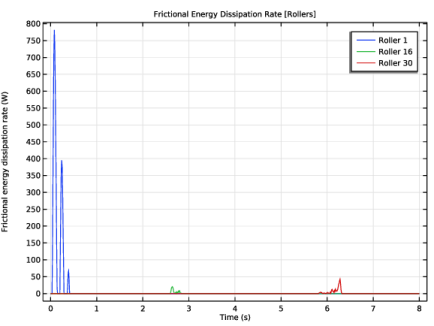
In the Settings window for 1D Plot Group, type Frictional Energy Dissipation Rate [Rollers] in the Label text field.
|
|
1
|
In the Model Builder window, expand the Frictional Energy Dissipation Rate [Rollers] node, then click Global 1.
|
|
2
|
|
3
|
Click
|
|
5
|
Locate the Legends section. In the table, enter the following settings:
|
|
1
|
|
2
|
|
3
|
Clear the y-axis label checkbox.
|
|
4
|
|
1
|
|
2
|
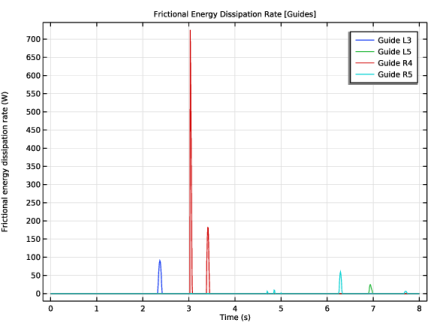
In the Settings window for 1D Plot Group, type Frictional Energy Dissipation Rate [Guides] in the Label text field.
|
|
1
|
In the Model Builder window, expand the Frictional Energy Dissipation Rate [Guides] node, then click Global 1.
|
|
2
|
|
3
|
Click
|
|
5
|
Locate the Legends section. In the table, enter the following settings:
|
|
1
|
|
2
|
|
1
|
|
2
|
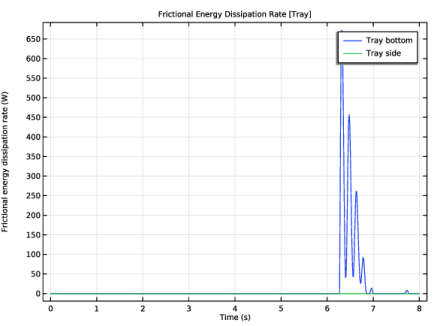
In the Settings window for 1D Plot Group, type Frictional Energy Dissipation Rate [Tray] in the Label text field.
|
|
1
|
In the Model Builder window, expand the Frictional Energy Dissipation Rate [Tray] node, then click Global 1.
|
|
2
|
|
3
|
Click
|
|
5
|
Locate the Legends section. In the table, enter the following settings:
|
|
1
|
|
2
|
|
1
|
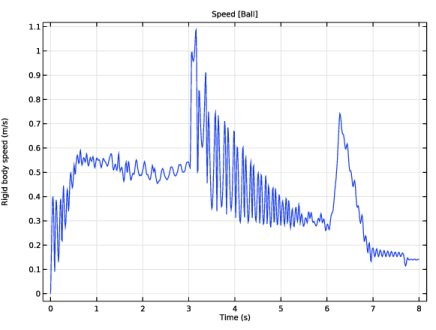
In the Model Builder window, under Results, Ctrl-click to select Speed [Ball], Angular Speed [Ball], and Angular Velocity [Ball].
|
|
2
|
Right-click and choose Group.
|
|
1
|
In the Model Builder window, under Results, Ctrl-click to select Contact & Friction Force [Rollers], Contact & Friction Force [Guides], and Contact & Friction Force [Tray].
|
|
2
|
Right-click and choose Group.
|
|
1
|
In the Model Builder window, under Results, Ctrl-click to select Frictional Energy Dissipation Rate [Rollers], Frictional Energy Dissipation Rate [Guides], and Frictional Energy Dissipation Rate [Tray].
|
|
2
|
Right-click and choose Group.
|
|
1
|
|
2
|
|
3
|