|
|
|
|
|
|
|||
|
|
|
|||
|
|
|
|||
|
|
||||
|
|
|
|||


|
•
|
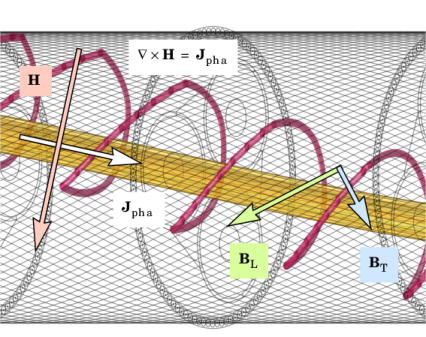
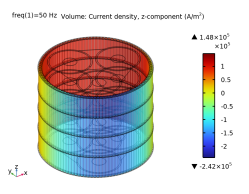
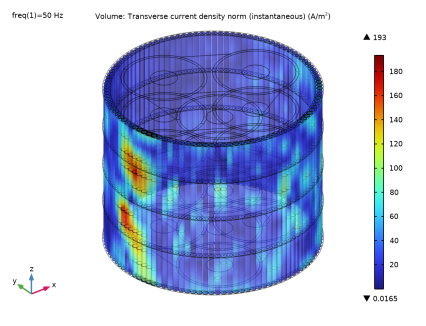
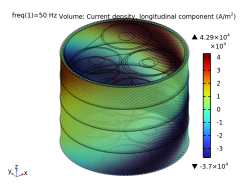
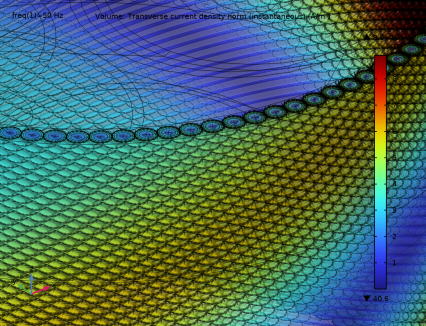
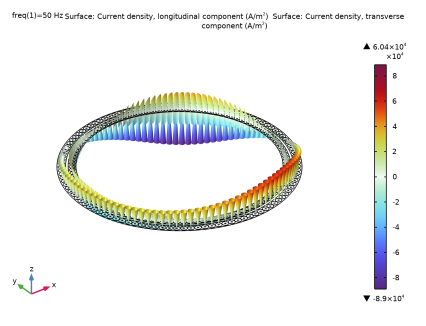
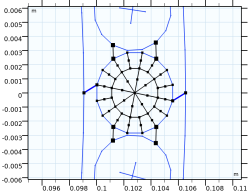
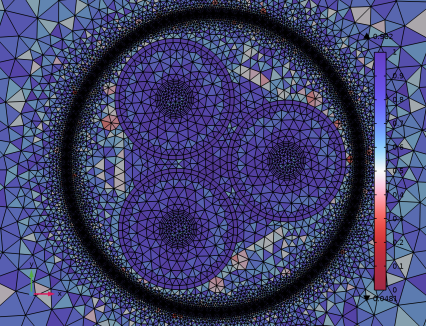
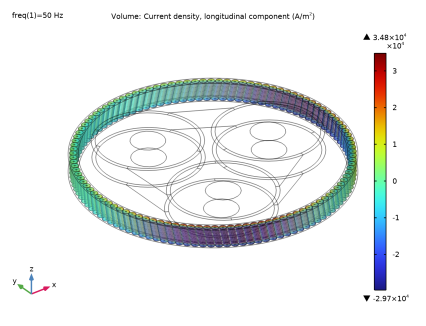
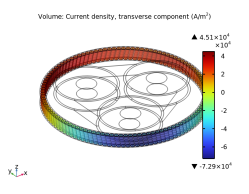
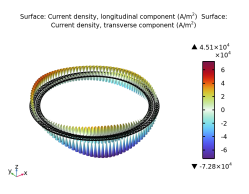
The transverse current density norm is noisy with a maximum around 100–200 A/m2. This is about 2000 times less than the maximum norm of the longitudinal current density abs(mf.Jz), and can be seen as an attempt of the numerical system to approximate “zero”. In other words, a reasonable guess for the margin of error in the armor currents is 100–200 A/m2.
|
|
•
|
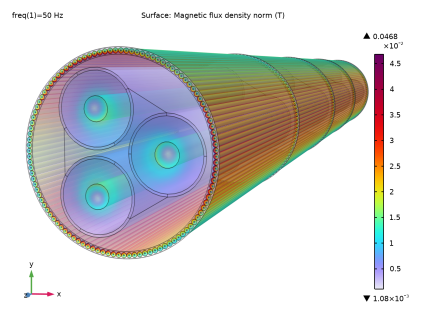
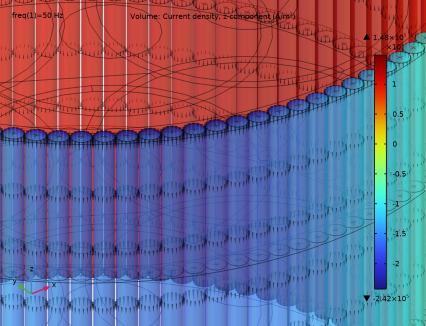
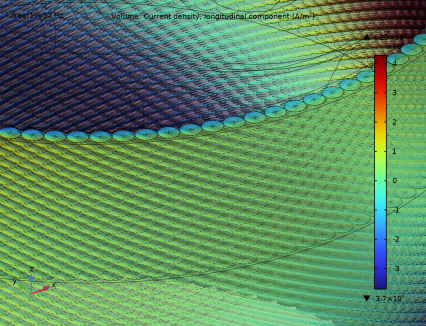
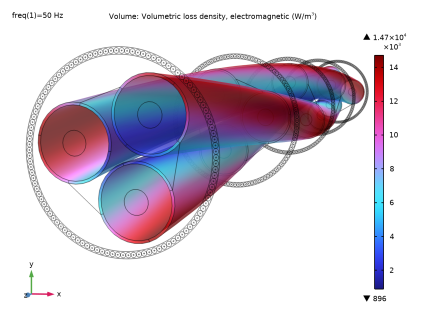
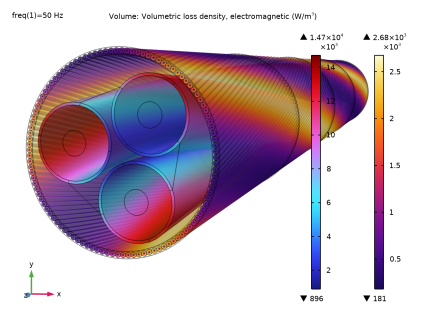
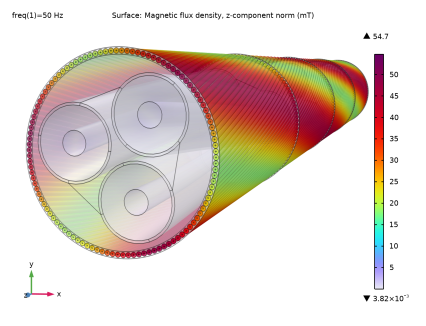
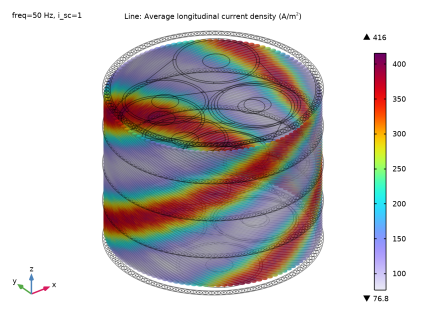
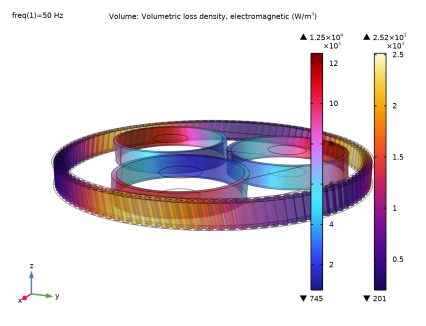
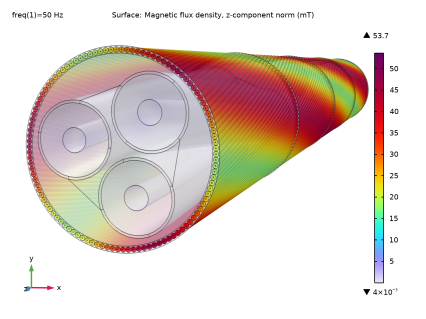
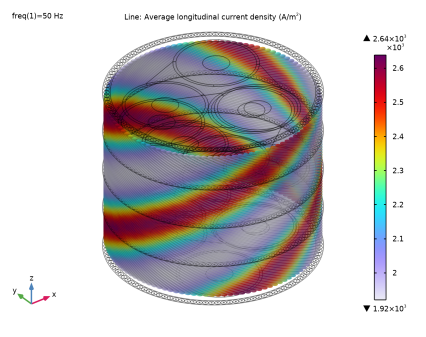
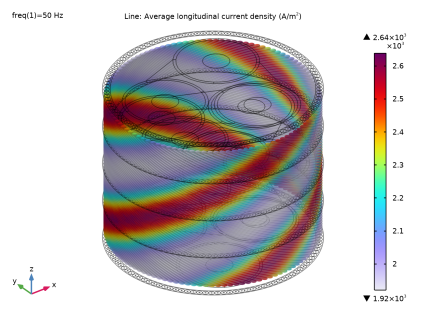
The losses are about 47 kW, 12.6 kW, and 7.4 kW per kilometer for the phases, screens, and armor respectively. The AC resistance is about 52 mΩ/km and the inductance is 0.41 mH/km. The overall deviation with respect to a fully detailed 2D model seems to lie around 0.5–1%.
|

|
•
|
|
1
|
|
2
|
Browse to the model’s Application Libraries folder and double-click the file submarine_cable_07_geom_mesh_3d.mph.
|
|
3
|
|
4
|
Browse to a suitable folder and type the filename submarine_cable_08_a_inductive_effects_3d.mph.
|
|
1
|
|
2
|
|
3
|
|
1
|
|
2
|
|
1
|
|
2
|
|
3
|
|
1
|
|
2
|
Go to the Add Physics window.
|
|
3
|
|
4
|
Click the Add to Component 1 button in the window toolbar.
|
|
5
|
|
1
|
|
2
|
|
3
|
|
1
|
|
2
|
|
3
|
|
1
|
|
2
|
Go to the Add Study window.
|
|
3
|
|
4
|
Right-click and choose Add Study.
|
|
5
|
|
1
|
|
2
|
|
1
|
|
2
|
|
1
|
In the Model Builder window, under Component 1 (comp1) right-click Materials and choose Blank Material.
|
|
2
|
|
3
|
|
4
|
|
5
|
|
1
|
|
2
|
|
3
|
|
4
|
|
1
|
|
2
|
|
3
|
|
4
|
|
1
|
In the Model Builder window, under Component 1 (comp1) > Materials, add the following material properties:
|
|
1
|
|
2
|
|
3
|
|
1
|
|
2
|
|
3
|
|
4
|
|
1
|
|
2
|
|
3
|
|
4
|
In the Graphics window toolbar, click
|
|
5
|
|
6
|
|
7
|
Click to collapse the Material Type section, the Coordinate System Selection section, and the Constitutive Relation sections.
|
|
8
|
|
1
|
In the Model Builder window, expand the Component 1 (comp1) > Magnetic Fields (mf) > Phase 1 > Geometry Analysis 1 node, then click Input 1.
|
|
2
|
|
3
|
|
1
|
|
2
|
|
3
|
|
1
|
|
2
|
|
3
|
|
4
|
|
1
|
In the Model Builder window, expand the Component 1 (comp1) > Magnetic Fields (mf) > Phase 2 > Geometry Analysis 1 node, then click Input 1.
|
|
2
|
|
1
|
|
2
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
|
6
|
|
1
|
|
2
|
|
3
|
Clear the Generate default plots checkbox.
|
|
4
|
|
1
|
|
2
|
In the Settings window for 3D Plot Group, type Magnetic Flux Density Norm (mf) in the Label text field.
|
|
1
|
|
2
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
In the Graphics window toolbar, click
 |
|
1
|
|
2
|
|
3
|
|
4
|
Select the Additional parallel planes checkbox.
|
|
5
|
|
6
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
|
6
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
|
1
|
|
2
|
|
3
|
|
4
|
|
1
|
|
2
|
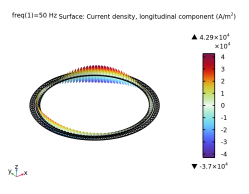
In the Settings window for 3D Plot Group, type Longitudinal Current Density (mf) in the Label text field.
|
|
3
|
|
4
|
|
5
|
|
1
|
|
2
|
|
3
|
|
4
|
Click Replace Expression in the upper-right corner of the Expression section. From the menu, choose Component 1 (comp1) > Magnetic Fields > Currents and charge > Current density - A/m² > mf.Jz - Current density, z-component, (or just type “mf.Jz” in the Expression field).
|
|
1
|
|
2
|
|
3
|
|
4
|
|
1
|
In the Model Builder window, right-click Longitudinal Current Density (mf) and choose Arrow Surface.
|
|
2
|
|
3
|
|
4
|
|
5
|
|
6
|
|
7
|
|
8
|
|
9
|
|
10
|
|
11
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
|
1
|
|
2
|
In the Settings window for 3D Plot Group, type Transverse Current Density (mf) in the Label text field.
|
|
1
|
|
2
|
|
3
|
|
4
|
Select the Description checkbox. In the associated text field, type Transverse current density norm (instantaneous).
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
|
6
|
|
7
|
|
1
|
|
2
|
|
3
|
|
4
|
Locate the Expressions section. In the table, enter the following settings:
|
|
5
|
Click
|
|
1
|
|
2
|
|
3
|
|
4
|
Locate the Expressions section. In the table, enter the following settings:
|
|
5
|
Click
|
|
1
|
|
2
|
|
3
|
|
4
|
Locate the Expressions section. In the table, enter the following settings:
|
|
5
|
Click
|
|
1
|
Go to the Table 3 window.
|
|
1
|
|
2
|
|
3
|
Locate the Expressions section. In the table, enter the following settings:
|
|
4
|
Click
|
|
1
|
|
2
|
|
3
|
Locate the Expressions section. In the table, enter the following settings:
|
|
4
|
Click
|
|
1
|
Go to the Table 5 window.
|
|
1
|
|
2
|
Browse to the model’s Application Libraries folder and double-click the file submarine_cable_08_a_inductive_effects_3d.mph.
|
|
3
|
|
4
|
Browse to a suitable folder and type the filename submarine_cable_08_b_inductive_effects_3d.mph.
|
|
1
|
|
2
|
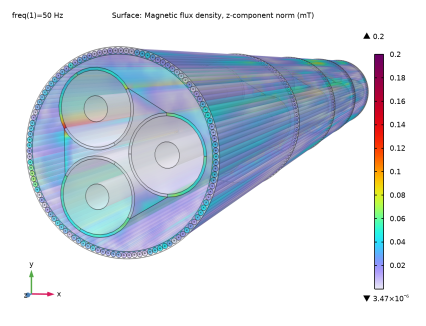
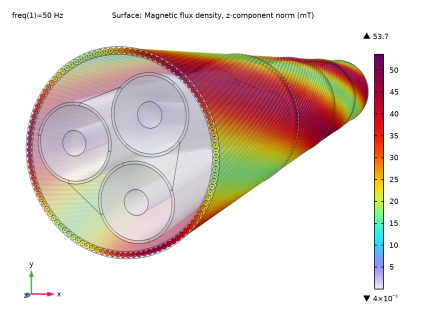
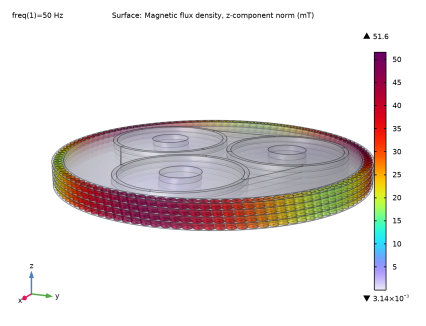
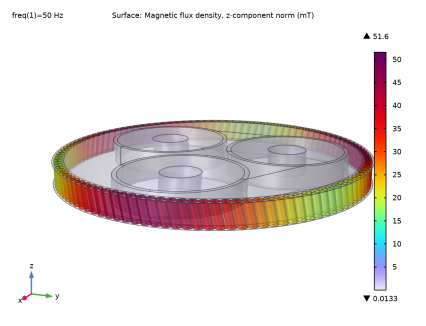
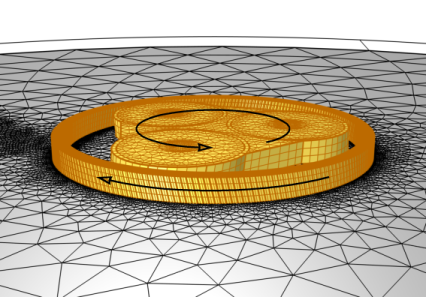
In the Settings window for 3D Plot Group, type Magnetic Flux Density, z-Component Norm (mf) in the Label text field.
|
|
1
|
In the Model Builder window, expand the Magnetic Flux Density, z-Component Norm (mf) node, then click Surface 1.
|
|
2
|
|
3
|
|
4
|
|
5
|
Select the Description checkbox. In the associated text field, type Magnetic flux density, z-component norm.
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
|
1
|
|
2
|
|
3
|
|
•
|
The value of Nper will become an integer, causing the parameter Tenab (defined as round(Nper)==Nper) to become “1” (true).
|
|
•
|
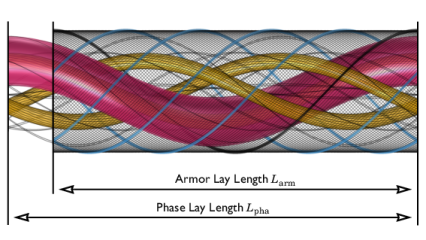
The length of the cable section included in the model Lsec (defined as CPcab*Nper) will increase tenfold. This sets the length of the geometry to be precisely one times the cable’s cross pitch (for more on this, see section On Lay Length and Cross Pitch).
|
|
•
|
The new parameter value Tenab will force the twist angle of the cable section Tsec (defined as 360[deg]*Tenab*Lsec/LLpha) to become “Lsec/LLpha” times one full revolution — note by the way that the expression 360[deg]*Tenab*Lsec/LLarm would have given you effectively the same angle.
|
|
•
|
In addition to this, Tenab will enable the slant correction factors SCFpha, and SCFarm, and will cause the two sweep operations in the geometry to generate helices instead of straight extrusions (as discussed in detail, in the Geometry & Mesh 3D tutorial).
|
|
1
|
|
2
|
|
3
|
|
1
|
In the Model Builder window, under Component 1 (comp1) right-click Mesh 1 and choose Build All (this should take a couple of minutes).
 |
|
2
|
|
3
|
|
1
|
|
2
|
|
3
|
|
1
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
|
6
|
Browse to the model’s Application Libraries folder and double-click the file submarine_cable_g_armor_variables.txt.
|
|
1
|
|
2
|
In the Show More Options dialog, in the tree, select the checkbox for the node Physics > Advanced Physics Options.
|
|
3
|
Click OK.
|
|
1
|
In the Model Builder window, expand the Component 1 (comp1) > Magnetic Fields (mf) node, then click Periodic Condition 1.
|
|
2
|
|
3
|
|
4
|
Right-click Component 1 (comp1) > Magnetic Fields (mf) > Periodic Condition 1 and choose Manual Destination Selection.
|
|
5
|
|
6
|
In the Graphics window toolbar, click
|
|
7
|
|
8
|
Click to expand the Orientation of Destination section. From the Transform to intermediate map list, choose Rotated System 2 (sys2).
|
|
1
|
In the Model Builder window, expand the Component 1 (comp1) > Magnetic Fields (mf) > Phase 1 > Geometry Analysis 1 node, then click Input 1.
|
|
2
|
|
3
|
Select the Slanted cut checkbox.
|
|
1
|
|
2
|
|
3
|
Select the Slanted cut checkbox.
|
|
1
|
|
1
|
|
2
|
Right-click Study 1 > Solver Configurations > Solution 1 (sol1) > Compile Equations: Frequency Domain and choose Statistics.
|
|
3
|
|
•
|
First, the Coil Geometry Analysis study step will solve a diffusion problem to determine the electric field needed to excite the phases. This should only take a minute and consume about 4–6 GB of RAM.
|
|
•
|
Then, the Frequency Domain study step will solve for the magnetic vector potential. The three coil ODE variables are included as well, allowing the system to tune the excitation such that the phase currents match the desired values: I0, I0*exp(-120[deg]*j), and I0*exp(+120[deg]*j).
|
|
1
|
|
2
|
|
1
|
In the Model Builder window, expand the Results > Longitudinal Current Density (mf) node, then click Volume 1.
|
|
2
|
|
3
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
|
6
|
|
7
|
|
1
|
In the Model Builder window, expand the Results > Transverse Current Density (mf) node, then click Volume 1.
|
|
2
|
|
3
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
|
6
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
|
6
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
In the Graphics window toolbar, click
 |
|
1
|
|
2
|
In the Settings window for 2D Plot Group, type Longitudinal and Transverse Current Density (mf) in the Label text field.
|
|
3
|
|
4
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
|
6
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
Locate the Scale section.
|
|
6
|
|
7
|
|
8
|
|
1
|
In the Model Builder window, right-click Longitudinal and Transverse Current Density (mf) and choose Surface.
|
|
2
|
|
3
|
|
4
|
|
5
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
|
6
|
|
1
|
In the Model Builder window, under Results > Longitudinal and Transverse Current Density (mf) right-click Surface 1 and choose Duplicate.
|
|
2
|
|
3
|
|
4
|
Select the Description checkbox. In the associated text field, type Current density, transverse component.
|
|
5
|
|
6
|
Clear the Deform scale factor checkbox.
|
|
1
|
|
2
|
|
3
|
|
4
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
|
6
|
|
8
|
|
1
|
|
2
|
In the Settings window for 3D Plot Group, type Volumetric Loss Density, Electromagnetic (mf) in the Label text field.
|
|
3
|
|
4
|
|
5
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
|
1
|
|
2
|
|
3
|
|
4
|
|
1
|
In the Model Builder window, under Results > Volumetric Loss Density, Electromagnetic (mf) right-click Volume 1 and choose Duplicate.
|
|
2
|
|
3
|
|
4
|
|
1
|
|
2
|
|
3
|
Click to select the
|
|
4
|
|
5
|
|
1
|
|
2
|
|
3
|
In the table, update the description. Type Phase losses (3D twist model), that is; replace “extruded 2D” with “3D twist”.
|
|
4
|
|
1
|
Go to the Table window.
|
|
2
|
Let us compare these figures with those from the Inductive Effects tutorial (submarine_cable_04_inductive_effects.mph):
|
|
1
|
|
2
|
Browse to the model’s Application Libraries folder and double-click the file submarine_cable_08_b_inductive_effects_3d.mph.
|
|
3
|
|
4
|
Browse to a suitable folder and type the filename submarine_cable_08_c_inductive_effects_3d.mph.
|
|
1
|
|
2
|
|
3
|
|
4
|
Browse to the model’s Application Libraries folder and double-click the file submarine_cable_d_therm_parameters.txt.
|
|
1
|
|
2
|
In the Show More Options dialog, in the tree, select the checkbox for the node Physics > Advanced Physics Options.
|
|
3
|
Click OK.
|
|
1
|
In the Model Builder window, expand the Component 1 (comp1) > Magnetic Fields (mf) node, then click Phase 1.
|
|
2
|
Click to collapse the Material Type section, the Coordinate System Selection section, the Constitutive Relation B-H section, and the Constitutive Relation D-E section.
|
|
3
|
|
4
|
|
5
|
Click to expand the Model Input section. From the T list, choose User defined. In the associated text field, type Tmcon.
|
|
1
|
|
2
|
|
3
|
|
4
|
Click to collapse the Coordinate System Selection section, the Constitutive Relation B-H section, and the Constitutive Relation D-E section.
|
|
5
|
Locate the Constitutive Relation Jc-E section. From the Conduction model list, choose Linearized resistivity.
|
|
6
|
Click to expand the Model Input section. From the T list, choose User defined. In the associated text field, type Tmpbs.
|
|
1
|
|
2
|
|
3
|
|
4
|
|
1
|
In the Model Builder window, under Component 1 (comp1) > Materials, add the following material properties:
|
|
1
|
|
2
|
|
3
|
In the table, update the description. Type Phase losses (linres 3D), that is; replace “3D twist model” with “linres 3D”.
|
|
4
|
|
1
|
Go to the Table window.
|
|
2
|
Now, let us make a comparison with the results from the 3D twist model discussed previously, and the fully coupled induction heating model discussed in the Thermal Effects tutorial (submarine_cable_06_thermal_effects.mph):
|
|
1
|
|
2
|
Browse to the model’s Application Libraries folder and double-click the file submarine_cable_08_c_inductive_effects_3d.mph.
|
|
3
|
|
4
|
Browse to a suitable folder and type the filename submarine_cable_08_d_inductive_effects_3d.mph.
|
|
1
|
|
2
|
|
3
|
|
4
|
Locate the Expressions section. In the table, enter the following settings:
|
|
5
|
Click
|
|
1
|
Go to the Table 6 window.
|
|
1
|
|
2
|
In the Settings window for 3D Plot Group, type Average Longitudinal Current Density (mf) in the Label text field.
|
|
3
|
|
4
|
|
5
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
|
6
|
|
7
|
Select the Radius scale factor checkbox.
|
|
8
|
|
1
|
|
2
|
|
3
|
|
1
|
|
2
|
|
3
|
|
4
|
|
1
|
|
2
|
|
3
|
Select the Description checkbox. In the associated text field, type Average longitudinal current density.
|
|
4
|
|
5
|
In the Average Longitudinal Current Density (mf) toolbar, click
 |
|
1
|
|
2
|
|
1
|
|
2
|
In the Show More Options dialog, in the tree, select the checkbox for the node General > Variable Utilities.
|
|
3
|
Click OK.
|
|
1
|
|
2
|
|
3
|
In the Settings window for State Variables, type Stabilization Compensation in the Label text field.
|
|
4
|
|
5
|
Locate the State Components section. In the table, enter the following settings:
|
|
6
|
|
7
|
|
8
|
|
1
|
|
2
|
In the Settings window for External Current Density, type Stabilization Compensation in the Label text field.
|
|
3
|
|
4
|
|
5
|
Select the Add contribution of the external current density to the losses checkbox.
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
Click
|
|
7
|
|
1
|
|
2
|
|
1
|
|
2
|
|
3
|
In the table, update the description. Type Insulator losses (comstab), that is; replace “linres 3D” with “comstab”.
|
|
4
|
|
1
|
Go to the Table window.
|
|
•
|
Secondly, this model may serve as a proof of concept (POC). This phenomenon is not restricted to cables. The same strategy can be implemented for cases where the effect of the finite insulator conductivity is more significant. Its effectiveness and accuracy may differ between models though, so validation will remain important.
|
|
1
|
|
2
|
Browse to the model’s Application Libraries folder and double-click the file submarine_cable_08_c_inductive_effects_3d.mph.
|
|
3
|
|
4
|
Browse to a suitable folder and type the filename submarine_cable_08_inductive_effects_3d.mph.
|
|
1
|
|
2
|
|
3
|
|
1
|
|
2
|
|
3
|
|
1
|
In the Model Builder window, expand the Component 1 (comp1) > Definitions > View 1 (Orthographic) node, then click Camera.
|
|
2
|
|
3
|
|
4
|
|
1
|
In the Model Builder window, expand the Component 1 (comp1) > Definitions > View 5 (Perspective) node, then click Camera.
|
|
2
|
|
3
|
|
4
|
|
5
|
|
6
|
|
7
|
|
8
|
|
9
|
|
10
|
|
11
|
|
12
|
|
13
|
In the Model Builder window, collapse the Component 1 (comp1) > Definitions > View 1,2,3,4 and View 5 nodes.
|
|
1
|
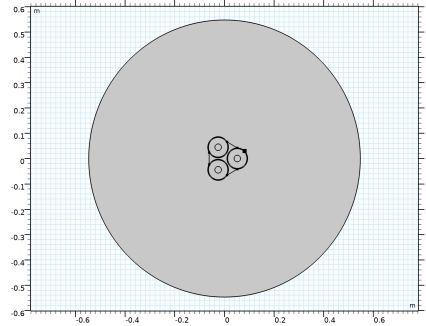
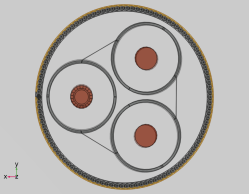
In the Model Builder window, expand the Component 1 (comp1) > Geometry 1 node, then click Phases and Screens (wp1).
|
|
2
|
|
3
|
|
1
|
In the Model Builder window, expand the Component 1 (comp1) > Geometry 1 > Phases, Screens, and Sea Bed (wp1) > Plane Geometry node, then click Convert to Solid 1 (csol1).
|
|
2
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
|
1
|
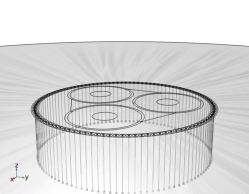
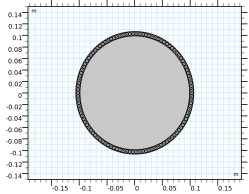
In the Model Builder window, under Component 1 (comp1) > Geometry 1 click Cable Armor and Sea Bed (wp2).
|
|
2
|
|
3
|
|
1
|
|
2
|
Click in the Graphics window and then press Ctrl+A to select all objects.
|
|
3
|
|
4
|
|
5
|
|
1
|
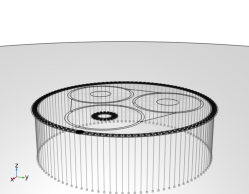
In the Model Builder window, under Component 1 (comp1) > Geometry 1 click Mesh Control Entities (wp3).
|
|
2
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
|
7
|
|
8
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
Locate the Endpoint section. Click to select the
|
|
6
|
|
7
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
|
6
|
|
7
|
|
1
|
In the Model Builder window, right-click Geometry 1 and choose Build All (this should take a couple of seconds).
 |
|
2
|
In the Model Builder window, collapse the Component 1 (comp1) > Geometry 1 > Phases, Screens, and Sea Bed (wp1) node, the Cable Armor (wp2) node, and the Mesh Control Entities (wp3) node.
|
|
1
|
In the Model Builder window, under Component 1 (comp1) > Definitions > Selections > Mesh Selections click Swept 1, Distribution 2.
|
|
2
|
|
3
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
|
6
|
|
7
|
Click OK.
|
|
8
|
|
9
|
|
10
|
|
11
|
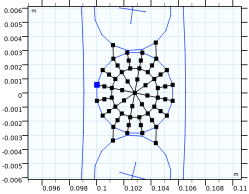
Locate the Output Entities section. From the Include entity if list, choose All vertices inside cylinder.
|
|
12
|
In the Graphics window toolbar, click
 |
|
1
|
|
2
|
|
3
|
|
4
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
|
6
|
|
7
|
Click OK.
|
|
8
|
|
9
|
|
10
|
|
11
|
|
12
|
Locate the Output Entities section. From the Include entity if list, choose All vertices inside cylinder.
|
|
13
|
|
14
|
|
1
|
|
2
|
In the Settings window for Intersection, type Copy Face 4, Source Boundaries in the Label text field.
|
|
3
|
|
4
|
|
5
|
|
6
|
|
1
|
|
2
|
In the Settings window for Difference, type Copy Face 4, Destination Boundaries in the Label text field.
|
|
3
|
|
4
|
|
5
|
|
6
|
Click OK.
|
|
7
|
|
8
|
|
9
|
|
10
|
Click OK.
|
|
11
|
|
1
|
|
2
|
In the Settings window for Intersection, type Copy Face 5, Source Boundaries in the Label text field.
|
|
3
|
|
4
|
|
5
|
|
6
|
Click OK.
|
|
7
|
|
8
|
|
1
|
|
2
|
In the Settings window for Difference, type Copy Face 5, Destination Boundaries in the Label text field.
|
|
3
|
|
4
|
|
5
|
|
6
|
Click OK.
|
|
7
|
|
8
|
|
9
|
|
10
|
Click OK.
|
|
11
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
|
6
|
Click OK.
|
|
7
|
|
8
|
|
9
|
In the Add dialog, in the Selections to subtract list, choose Phases, Boundaries Bottom, Screens, Boundaries Bottom (Mapped 3), Armor, Boundaries Bottom, Mapped 4, Copy Face 4, and Copy Face 5.
|
|
10
|
|
11
|
|
1
|
In the Model Builder window, expand the Component 1 (comp1) > Mesh 1 > Mapped 3 node, then click Size 1.
|
|
2
|
|
3
|
|
4
|
|
5
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
|
6
|
Click
|
|
7
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
|
6
|
|
7
|
|
8
|
Click
|
|
9
|
|
1
|
|
1
|
|
2
|
|
3
|
|
1
|
|
2
|
|
3
|
Click the Custom button.
|
|
4
|
Locate the Element Size Parameters section.
|
|
5
|
|
6
|
|
7
|
|
1
|
In the Model Builder window, expand the Component 1 (comp1) > Mesh 1 > Swept 1 node, then click Distribution 1.
|
|
2
|
|
3
|
|
1
|
|
2
|
|
3
|
|
1
|
|
2
|
In the Settings window for Swept, in the Graphics window toolbar, click
 |
|
1
|
|
2
|
|
3
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
|
6
|
|
7
|
|
1
|
In the Model Builder window, expand the Study 1 > Solver Configurations > Solution 1 (sol1) > Stationary Solver 2 node, then click Suggested Direct Solver (mf).
|
|
2
|
|
3
|
|
4
|
|
1
|
|
2
|
|
3
|
In the table, update the description. Type Phase losses (linres 3D, short-periodic), that is; replace “linres 3D” with “linres 3D, short-periodic”.
|
|
4
|
|
1
|
Go to the Table window.
|
|
1
|
|
2
|
|
3
|
|
1
|
|
2
|
|
3
|
Clear the Enable filter checkbox.
|
|
4
|
|
5
|
|
1
|
In the Model Builder window, expand the Results > Mesh Quality, Poor Quality Elements node, then click Mesh 1.
|
|
2
|
|
3
|
|
4
|
|
5
|
|
1
|
|
2
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
|
1
|
|
2
|
|
1
|
|
2
|
|
1
|
|
2
|
|
1
|
|
2
|
|
3
|
|
1
|
|
2
|