Springs and Dampers
You can use a
Spring–Damper
to connect two points by an elastic spring, a viscous damper, or both. There are two variants of spring —
directional
and
matrix
. The two connection points are called the
source
and
destination
points, respectively.
•
A source point can be placed on a flexible body, a rigid domain, an attachment, a fixed position, or a moving base.
•
A destination point can be placed on a flexible body, an attachment, a rigid domain, or a prescribed displacement.
When a flexible body is defined within the Multibody Dynamics interface, a connection point can be directly selected on the body. In the case when a flexible body is defined in another interface (Solid Mechanics, Shell, or Beam interface) an attachment is needed to define a connection point.
In directional spring, the two points can move relative to each other in an arbitrary way as long as they do not coincide. The spring and damping forces act along the line between the current positions of the two connection points.
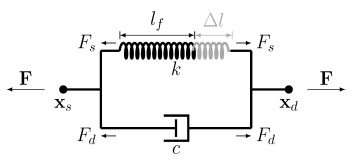
Figure 2-2:
Conceptual sketch of a Spring–Damper.
You can specify that the Spring–Damper should be deactivated under certain conditions. It can for example be active only in tension, or break at a certain elongation.
Spring–Damper Theory