Cam–Follower
A cam is defined through a set of boundaries or edges that is being followed by a point called “follower”. The cam selection can be defined on rigid as well as on elastic bodies. Thus, cam boundaries or edges can undergo any kind of rigid body motion as well as deformation. When defining a cam selection, it should also be possible to use boundaries or edges that are defined outside the physics interface.
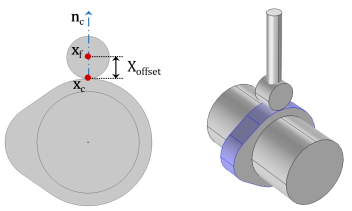
A follower is defined through a point which follows the cam boundaries or edges with certain optional offset. The follower point can be a part of rigid or elastic bodies.
Figure 2-1:
Example of a cam–follower connection.
The following settings help in avoiding convergence issues and getting more accurate results:
•
The geometry shape order should be quadratic or higher. By default, it is the same as the shape order of the physics dependent variable. Select quadratic as the discretization for the physics dependent variable.
•
The finite element mesh should be sufficiently fine on the cam selection in order to get accurate spatial position, spatial normal, and spatial tangent of the closest point.
•
The solver time steps should be sufficiently small such that the bodies do not rotate or move by a large amount in single time step.
Cam–Follower Theory