The Joints (joints) interface (

), found under the
Structural Mechanics branch (

) when adding a physics interface, is intended for analysis of mechanical assemblies. The parts in the assembly can be rigid or flexible, and are connected by various types of joints. Flexible parts can be defined using solid, shell, or beam elements. Different structural elements can be connected through joints by defining
Attachment nodes on the boundaries of solid element, edges of a shell element, or points on the beam element. With the Nonlinear Structural Materials Module, you can also incorporate nonlinear material models like hyperelasticity or plasticity by adding a Solid Mechanics interface to the model.
The Label is the default physics interface name.
The Name is used primarily as a scope prefix for variables defined by the physics interface. Refer to such physics interface variables in expressions using the pattern
<name>.<variable_name>. In order to distinguish between variables belonging to different physics interfaces, the
name string must be unique. Only letters, numbers, and underscores (_) are permitted in the
Name field. The first character must be a letter.
The default Name (for the first physics interface in the model) is
joints.
From the Structural transient behavior list, select
Include inertial terms or
Quasi static. Use
Quasi static to treat the mechanical behavior as quasi static (with no mass effects, that is, no second-order time derivatives). Selecting this option gives a more efficient solution for problems where the variation in time is slow when compared to the natural frequencies of the system.
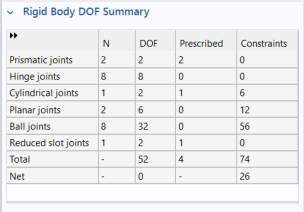
The last two rows of the table contain a summary. In the Total row, the number of DOFs, prescribed conditions, and constraints are summed.
The Net row contains the net number of degrees of freedom of the model — that is, the difference between all degrees of freedom and the constraints and prescribed motions. A negative net number of degrees of freedom indicates that the mechanism is overconstrained and is not shown. In that case, the net number of constraints is instead displayed.
To display this section, click the Show More Options button (

) and select
Advanced Physics Options in the
Show More Options dialog. Normally these settings do not need to be changed.
To display the contents of this section, click the Show More Options button (

) and select
Advanced Physics Options in the
Show More Options dialog. Normally these settings do not need to be changed.
From the Value type when using splitting of complex variables list, you can specify the value type (
Real or Complex) of dependent variables when the
Split complex variables in real and imaginary parts setting is activated in the
Compile Equations node of any solver sequence used.