The ALE machinery defines a number of variables based on the relations in Equation 18-3. The variables and component names are listed in
Table 18-1, where indices
i and
j are
1,
2, or
3. A more detailed explanation of the variables follows below.
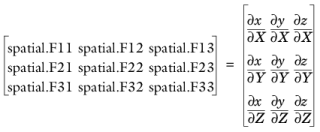
The matrix spatial.F contains components of the Jacobian of spatial coordinates with respect to material coordinates:
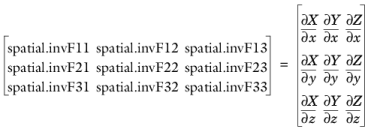
The matrix spatial.invF contains the inverse of
spatial.F, which consists of components of the Jacobian of material coordinates with respect to spatial coordinates:
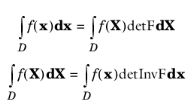
The volume/area/length factor spatial.detF and its inverse
spatial.detInvF are ratios of local element volume/area/length computed in the spatial and material frames. That is, these variables are the factors necessary to compute a spatial frame integral of quantity over a set of elements of any dimension, using material frame coordinates, or the other way around:
where D is a set of volume, surface, line, or point elements. This means that
spatial.detF is a ratio of volumes in domains of 3D models, a ratio of areas in domains of plane 2D models and on boundaries of 3D models, and a ratio of lengths on boundaries of 2D models and edges in 3D models. On points,
spatial.detF is equal to 1.
These variables are defined in complete analogy with the corresponding spatial variables, but based on the relation between material frame coordinates
X and geometry frame coordinates
Xg.
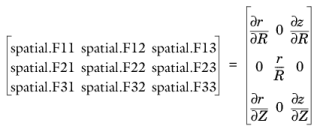
The volume/area/length factors spatial.detF and
spatial.detInvF also include the azimuthal strain factor
r/R, such that they fulfill
where D is any set of surface, line, or point elements in an axisymmetric geometry. This means that
spatial.detF is a ratio of volumes in domains, a ratio of areas on boundaries and a ratio of lengths on point entities.