There are two approaches to embed the tension field theory into the framework of classical membrane theory, but essentially both approaches are equivalent (Ref. 165). One approach is to replace the strain energy density with a relaxed variant of it, while the other approach is to modify the deformation gradient (
Ref. 163). While the first approach can only be used for isotropic membranes, the second approach is more general (
Ref. 163), and it is the method implemented in COMSOL Multiphysics.
The undeformed configuration of the membrane is described by the material coordinates X,
Y, and
Z. The uniaxial stress occurs in the
X direction;
Y is the wrinkling direction and
Z is the normal to the membrane plane (
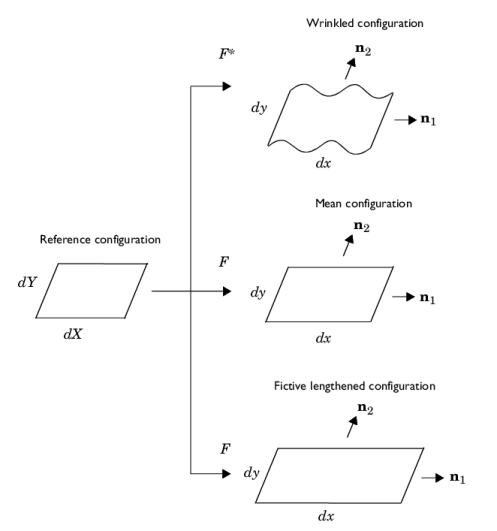
Figure 3-59). The deformed configuration is represented by the
x,
y, and
z coordinates. After deformation, the membrane can be in one of three possible states:
As shown in Figure 3-59 there are three different kinematic descriptions (
Ref. 163):
When n1 is the direction of uniaxial extension, and assuming that wrinkling occurs in the
n2 direction, the modified deformation tensor

is written as
Here, ⊗ is the outer product of two vectors,
(a⊗b)ij = aibj, and
β is the wrinkling parameter, so
β =
0 represents a taut condition. According to the orthogonality condition in tension field theory, these two vectors satisfy
where σ is the Cauchy stress tensor written in terms of the second Piola–Kirchhoff stress tensor
Since the material properties and membrane theory itself are given in the reference configuration, Equation 3-250 and
Equation 3-251 are transformed to the reference configuration (
Ref. 164). The fictive Green–Lagrange strain tensor

is then written with the help of a vector in the reference configuration which corresponds to the wrinkling direction
n2, so
g =
n2⋅F,
where βm and
N2 are the wrinkling parameter and wrinkling direction in the reference configuration. The two unknowns
β and
n2 in the deformed configuration are replaced by the two unknowns
βm and
N2 in the reference configuration.
So the scalar wrinkling angle αm is sufficient to define the wrinkling vector
N2. The two nonlinear equations in
Equation 3-251 are then solved for the two unknowns
αm and
βm with the Newton-Raphson method. Once the parameters
αm and
βm are determined, the deformation gradient and the second Piola–Kirchhoff stress tensor are modified to get the correct stress distribution and to define the wrinkled regions.