The Electromechanics, Solid Interface theory is described in this section:
where ρ is the density,
u denotes the structural displacement vector,
σ is the stress tensor, and
fv is an external volume force (such as gravity).
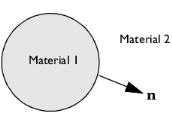
where σ1 and
σ2 represent the stress tensor in Materials 1 and 2, respectively, and
n1 is the normal vector pointing out from the domain containing Material 1.
Where E is the electric field,
I is the identity tensor,
ε0 is the permittivity of free space, and
where the electric susceptibility χ can be a function of the mechanical strain in the material
with F = ∇u + I and
J = det
(F). The mechanical energy function
Ws(C) depends on the solid model used.
where σm is a mechanical component of the total stress and the ambient pressure
p2 in to surrounding air or other medium (if present). Using
Equation 3-167:
where the electric field E is computed in material 2.
which sometimes is referred to as the Korteweg-Helmholtz force. For homogeneous materials without deformation, one has ∇χ = 0. Hence, in the absence of free charges (
ρe = 0), the body force becomes zero. Thus, the whole electromechanical load on the solid is due to the Maxwell stress jumps at the boundaries between domains with different material properties.
Note that in contrast to the above equation, the expression for the stress tensor itself (Equation 3-159) seems to ignore the material polarization properties. However, if the frame difference is important because of the deformations, one has
where σEM is given by
Equation 3-159, which shows the consistency of the theory. The key assumption behind the derivation of
Equation 3-161 is that the material components of the electric susceptibility
χm are independent of deformations.